https://www.home-assistant.io/common-tasks/os/
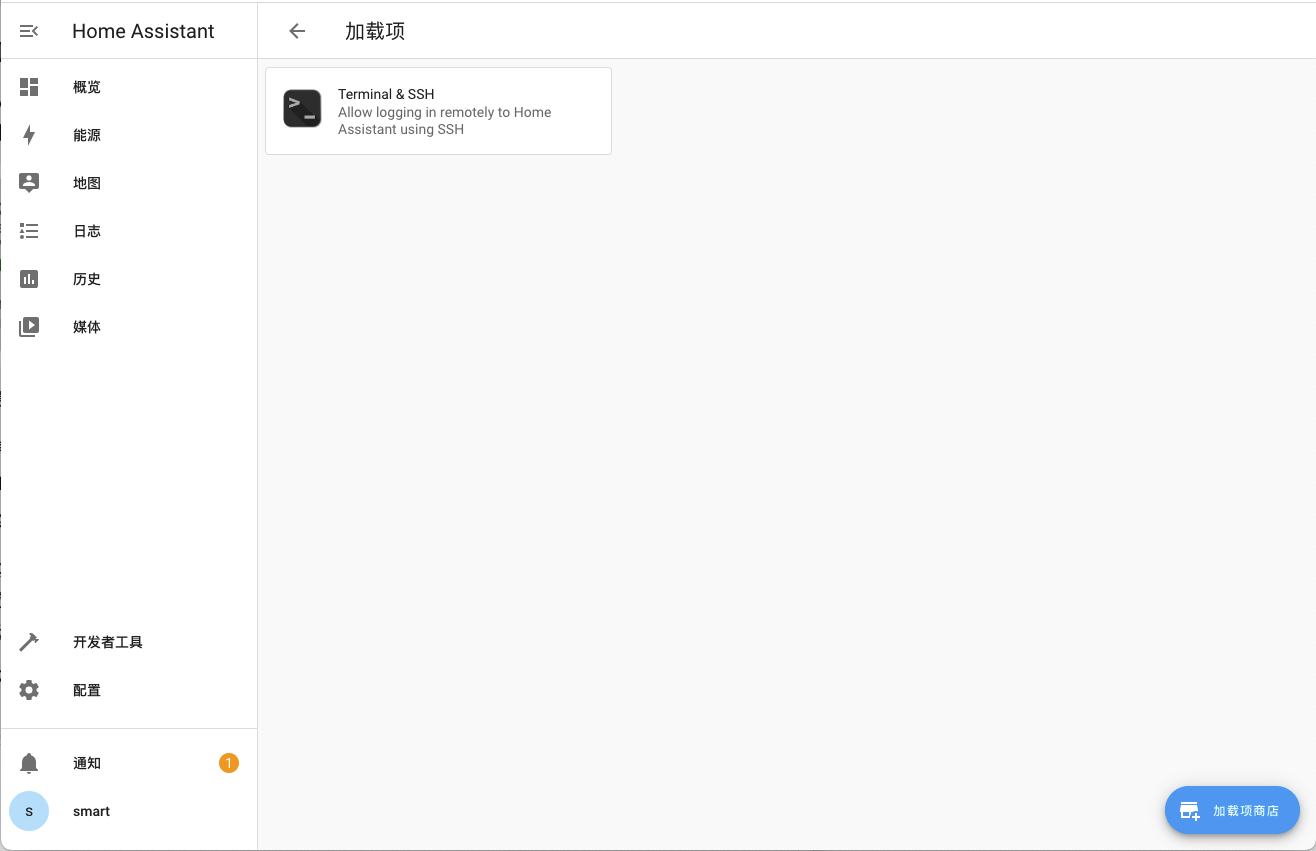
addons install core-ssh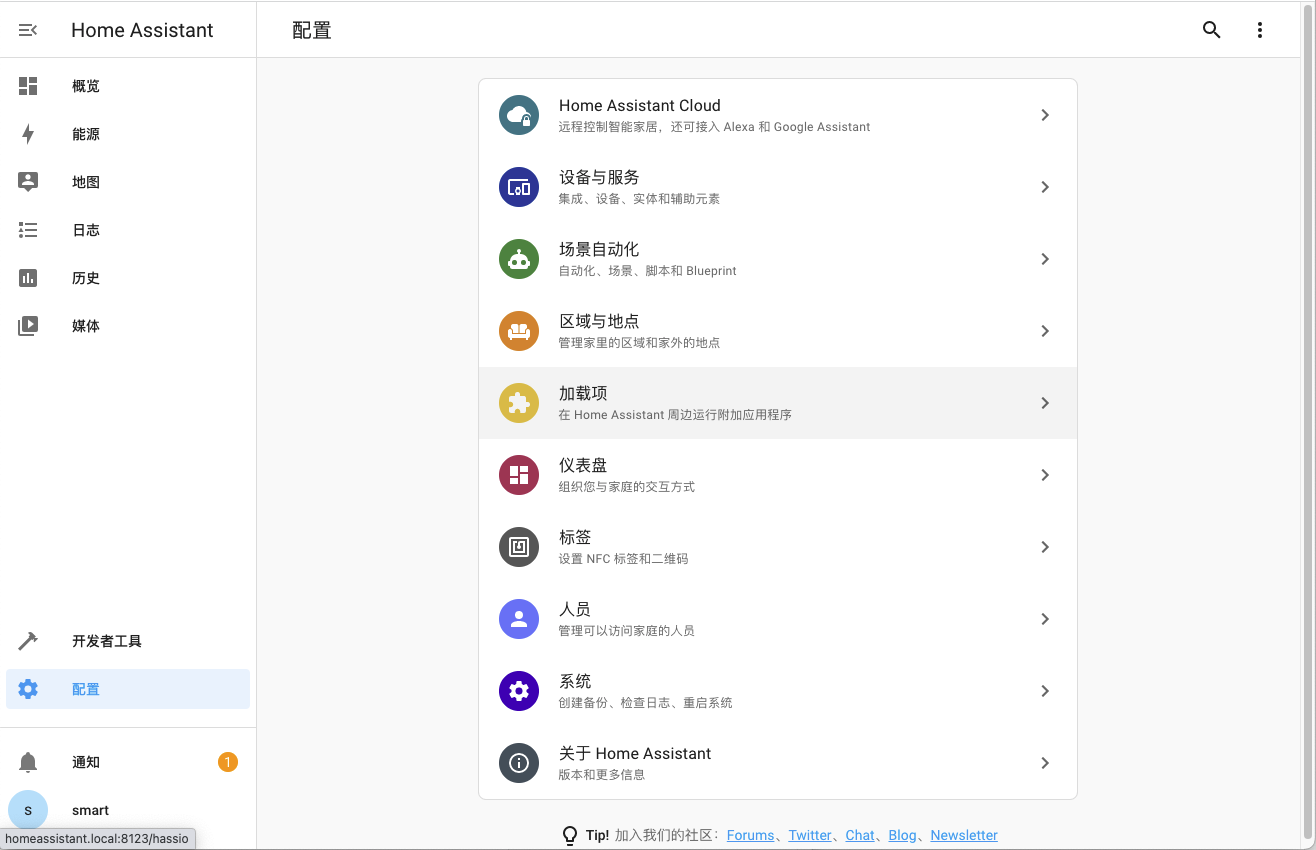
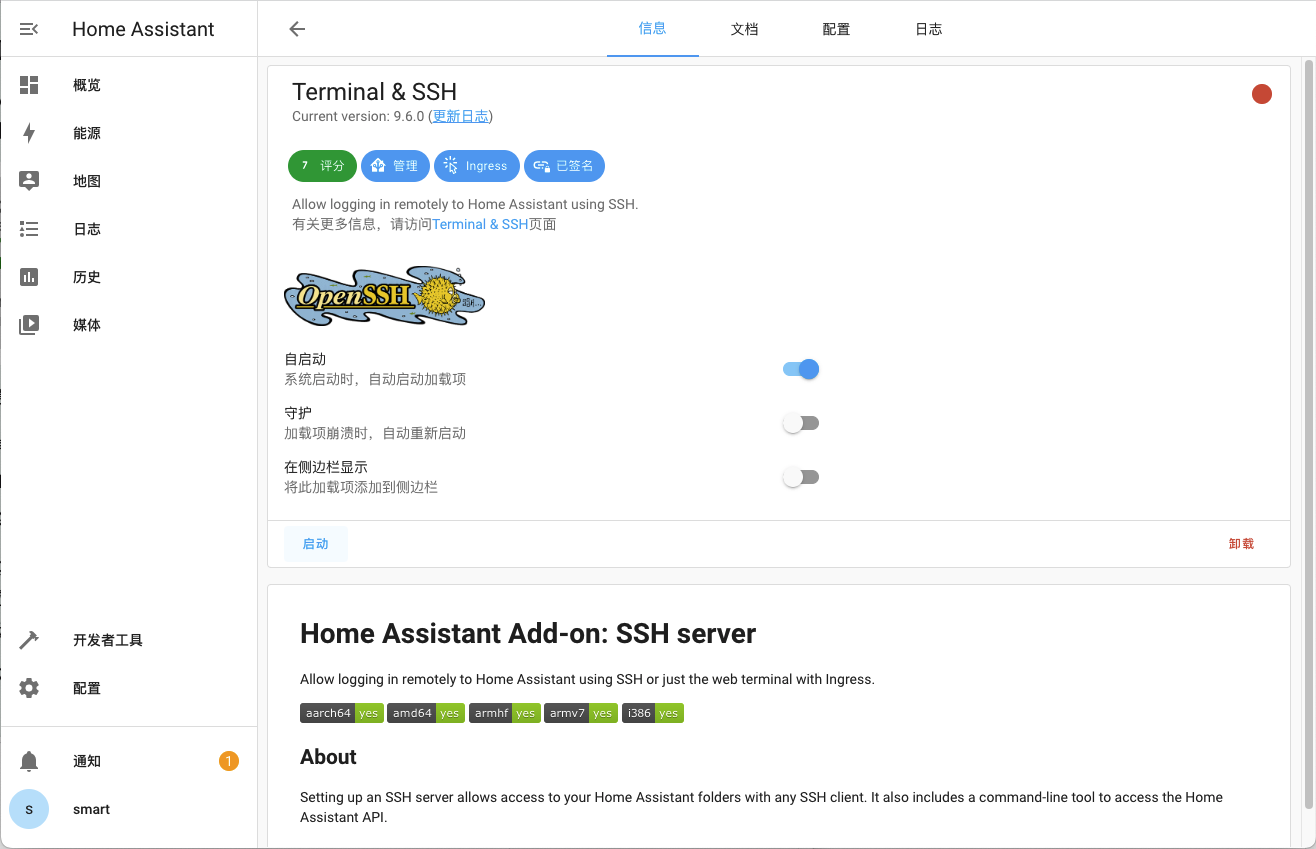
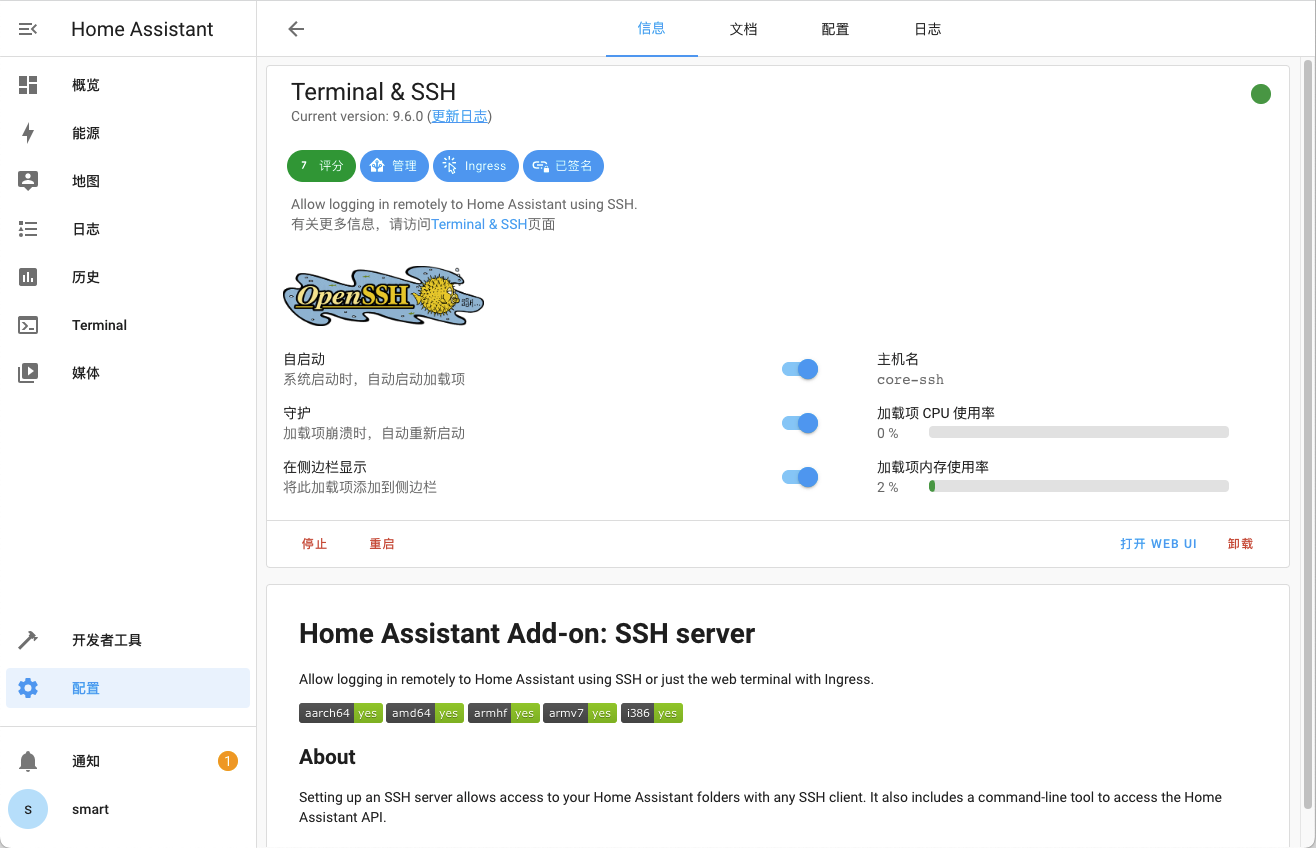
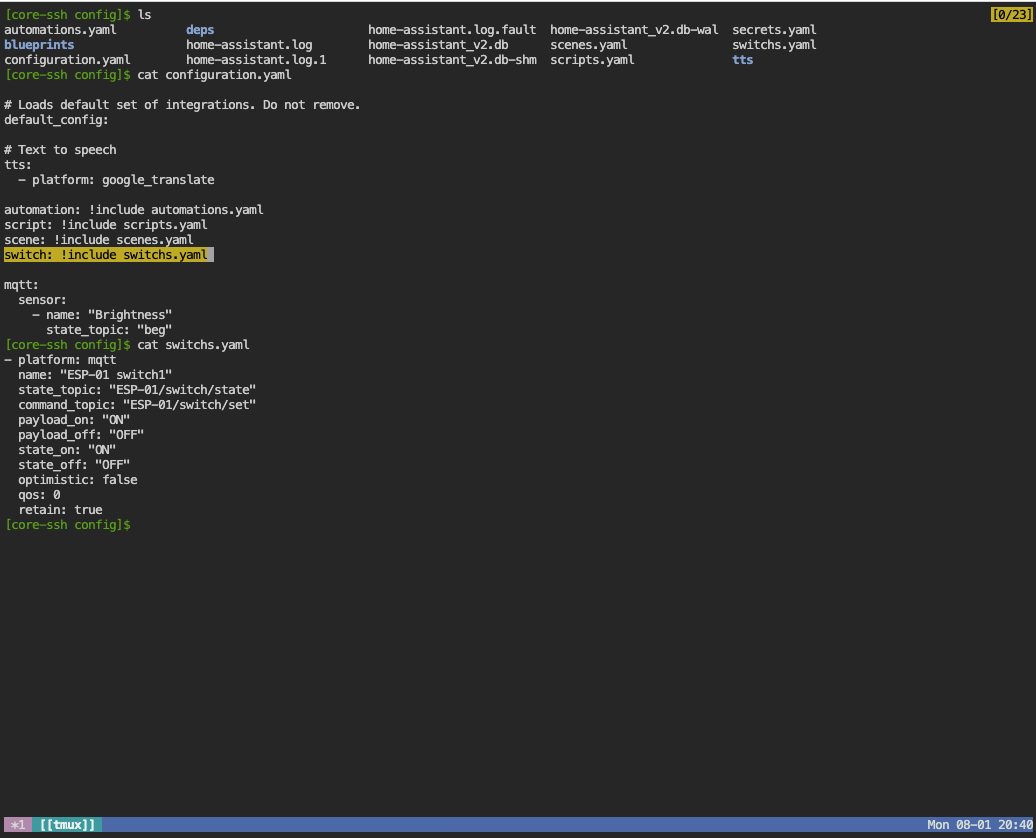
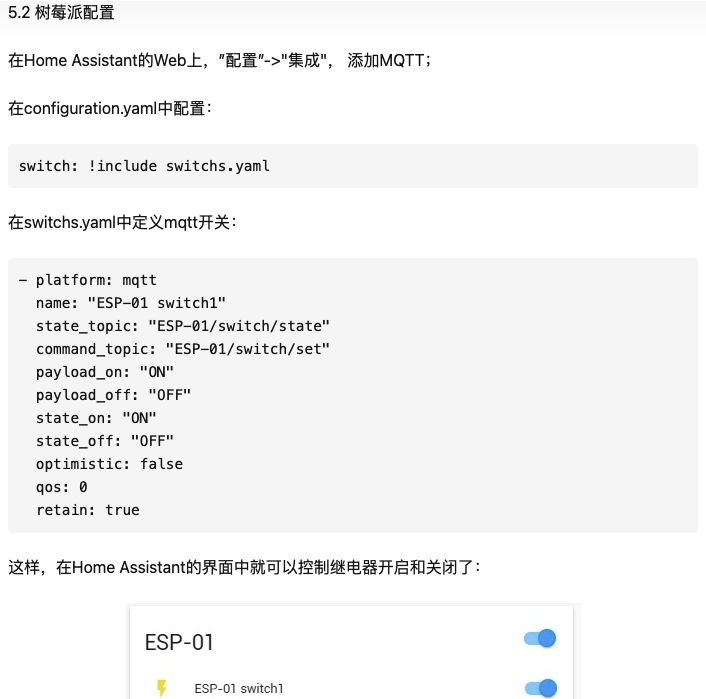
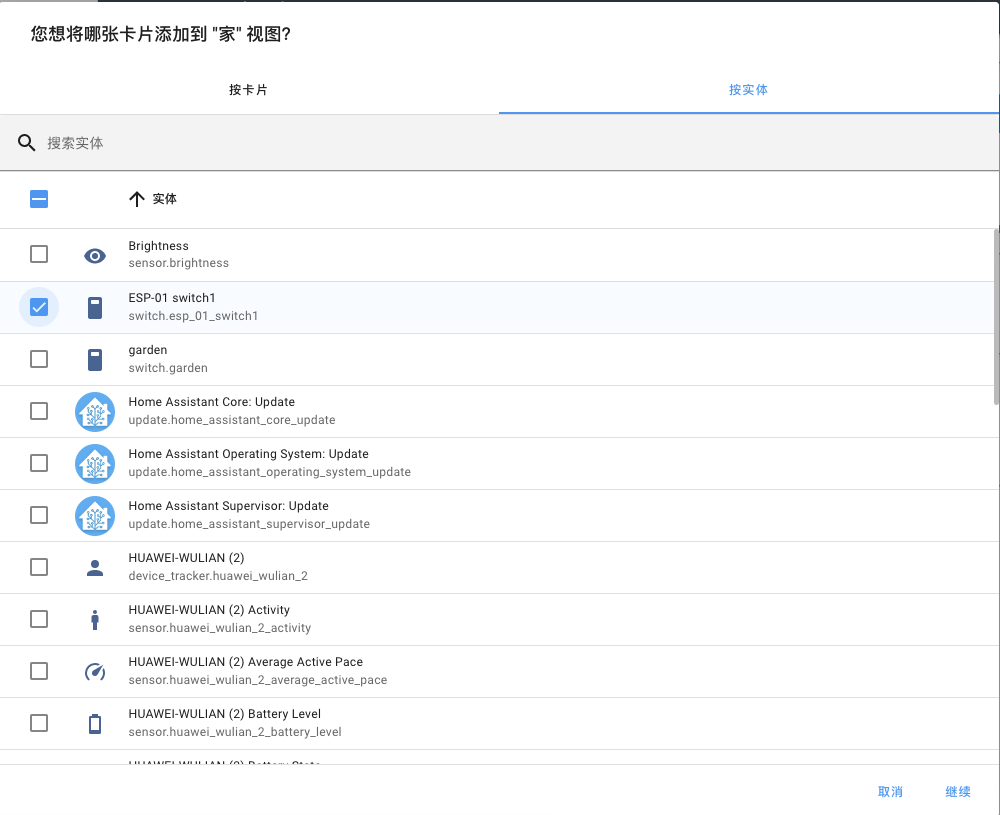
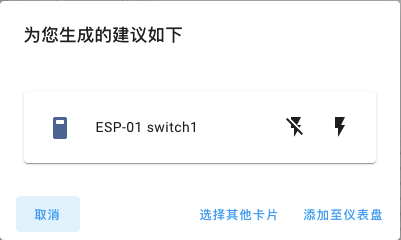
增加一个开关

wget http://www.mixdiy.com/wp-content/uploads/2022/08/update-upgrade32.shwget http://www.mixdiy.com/wp-content/uploads/2022/07/update-upgrade64bit-1.sh --no-check-certificate
google pinyin
curl -L http://www.mixdiy.com/wp-content/uploads/2022/07/update-upgrade64bit-1-2.sh | sudo bash
舵机防抖控制
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
signal = 18
GPIO.setup(signal, GPIO.OUT)
frequency = 50
pwm = GPIO.PWM(signal, frequency)
def get_duty(direction):
duty = (1/18)*direction + 2.5
return duty
if __name__ == '__main__':
try:
pwm.start(0)
while True:
direction = float(input("Please input a direction between 0 and 180:"))
duty = get_duty(direction)
pwm.ChangeDutyCycle(duty)
time.sleep(0.04) #防抖
pwm.ChangeDutyCycle(0) #防抖
except Exception as e:
print('An exception has happened',e)
finally:
pwm.stop()
GPIO.cleanup()
修正角度
import RPi.GPIO as GPIO
import random
import time
GPIO.setmode(GPIO.BCM)
signal = 18
GPIO.setup(signal, GPIO.OUT)
frequency = 50
pwm = GPIO.PWM(signal, frequency)
def get_duty(direction):
duty = (1/18)*direction + 2.5
return duty
if __name__ == '__main__':
try:
pwm.start(0)
while True:
direction = float(input("Please input a direction between 0 and 180:"))
# direction = random.randint(0,0)
print(direction)
duty = get_duty(direction)
for i in range(1,20):
pwm.ChangeDutyCycle(duty)
time.sleep(0.04)
pwm.ChangeDutyCycle(0)
except Exception as e:
print('An exception has happened',e)
finally:
pwm.stop()
GPIO.cleanup()
一、国内常用pip镜像源
http://pypi.douban.com/simple/ 豆瓣
http://mirrors.aliyun.com/pypi/simple/ 阿里
http://pypi.hustunique.com/simple/ 华中理工大学
http://pypi.sdutlinux.org/simple/ 山东理工大学
http://pypi.mirrors.ustc.edu.cn/simple/ 中国科学技术大学
https://pypi.tuna.tsinghua.edu.cn/simple/ 清华大学
http://pypi.hustunique.com/ 华中科技大学
http://mirrors.cloud.tencent.com/pypi/simple 腾讯
https://repo.huaweicloud.com/repository/pypi/simple/ 华为
二、使用方法(pip安装):
示例代码(安装requests库):
pip install -i http://pypi.douban.com/simple/ requests
若遇到信任问题可添加参数,如
pip install requests -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
永久修改pip源方法
Windows:新建 pip.ini 文件存放在 User\pip\pip.ini
Linux:新建pip.conf文件存放在 ~/.pip/pip.conf
内容如下[global]
trusted-host=mirrors.aliyun.com
index-url=http://mirrors.aliyun.com/pypi/simple/
查看版本号
lsb_release -a
codename就是你的Ubuntu版本的代号,需将以下bionic更改为自己系统的版本
sudo gedit /etc/apt/sources.list
#清华源 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
再执行sudo apt update及sudo apt upgrade
然后就可以sudo dpkg -i ipscan_3.6.2_amd64.deb了
使用sudo apt-get install arp-scan 安装(确保网络链接正常)
利用ifconfig 或ip addr 查看本机的ip地址,一般有线在interface en0/eth0, 无线在wlan0上.
ifconfig
然后就可以查看同一局域网的其他设备
sudo arp-scan -I eth0 --localnetctr+r快捷键(推荐)
一个比较快速的方法是使用"ctrl+r"快捷键,在命令行使用ctrl+r,ctrl+r是反向搜索 (reverse-i-search )
输入要查找命令的关键字,会显示在第二个红色标记位置,如果找到对应的命令,会显示在第三个标记位置, 如果不是自己期望的命令,可以多次使用“ctrl+r”切换显示命令,然后按键enter或者->即执行命令。import os
def getpidinfo():
p=os.popen('pidof chrome')
line=p.readline()
return(line.split())
if __name__ == '__main__':
if getpidinfo() == []:
print('none')
else:
for i in getpidinfo():
print(i)import os
import time
def getpidinfo():
p=os.popen('pidof mosquitto')
line=p.readline()
return(line.split())
if __name__ == '__main__':
while True:
if getpidinfo() == []:
print(getpidinfo())
os.system('sudo systemctl restart mosquitto.service')
time.sleep(5)
else:
continue