最新网络电视播放链接,对于喜欢自己diy机顶盒的朋友是好资源,其实用树莓派 zero 做一个机顶盒也就几十块钱,频道多到眼花缭乱。当然对于不喜欢捣鼓技术的也可以电脑直接播放。下面放出链接(直接下载TV.txt文件即可):
作者: [email protected]
国内访问GitHub的无忧方式
国内经常访问不了GitHub,但这个网站对于广大程序员和技术工作者又不可或缺,这里给大家一个链接,可以直接访问无忧,链接如下:
GIMP给图片重新着色和抠图
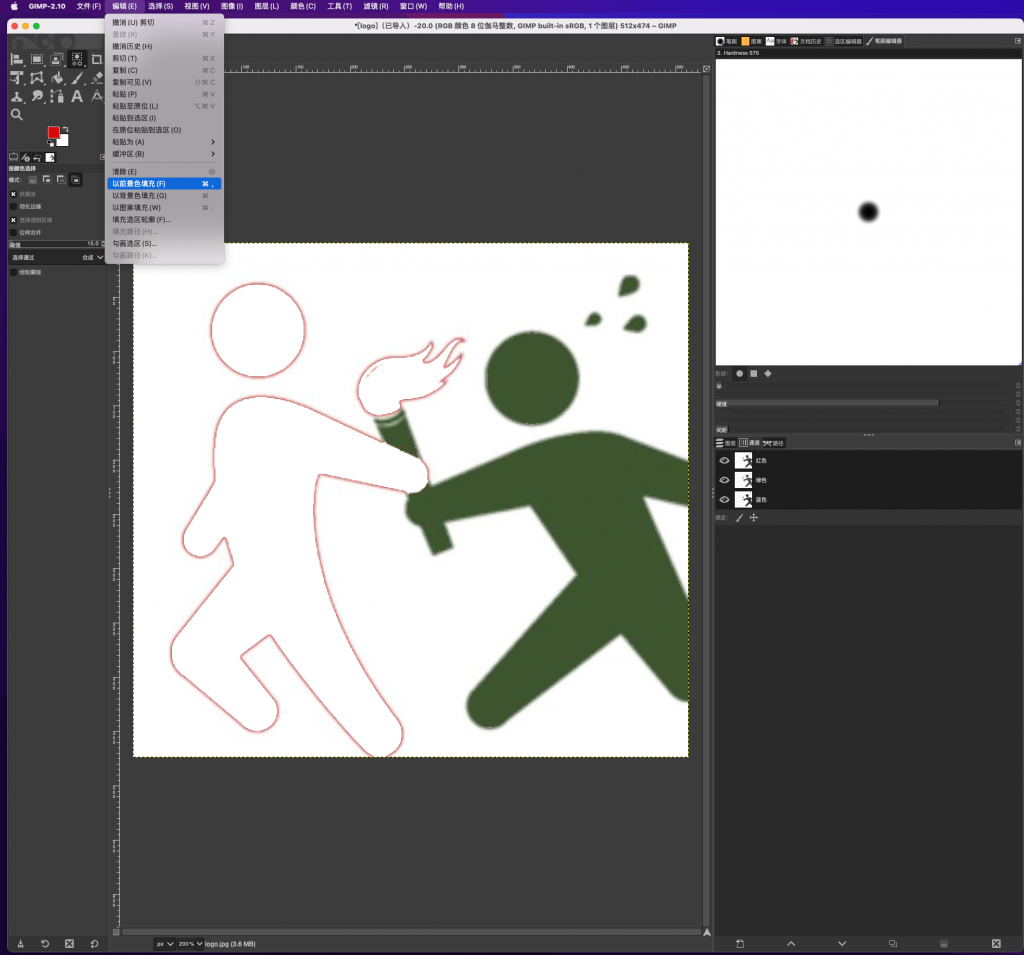
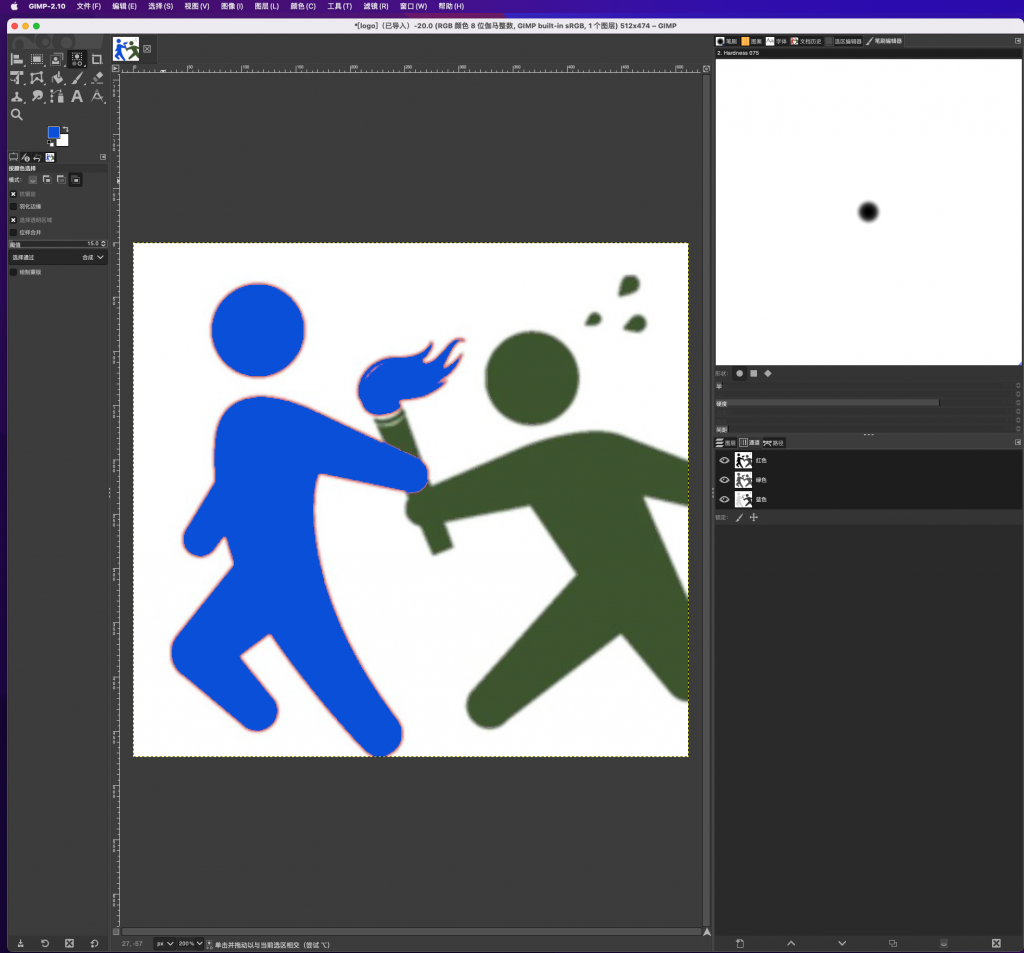
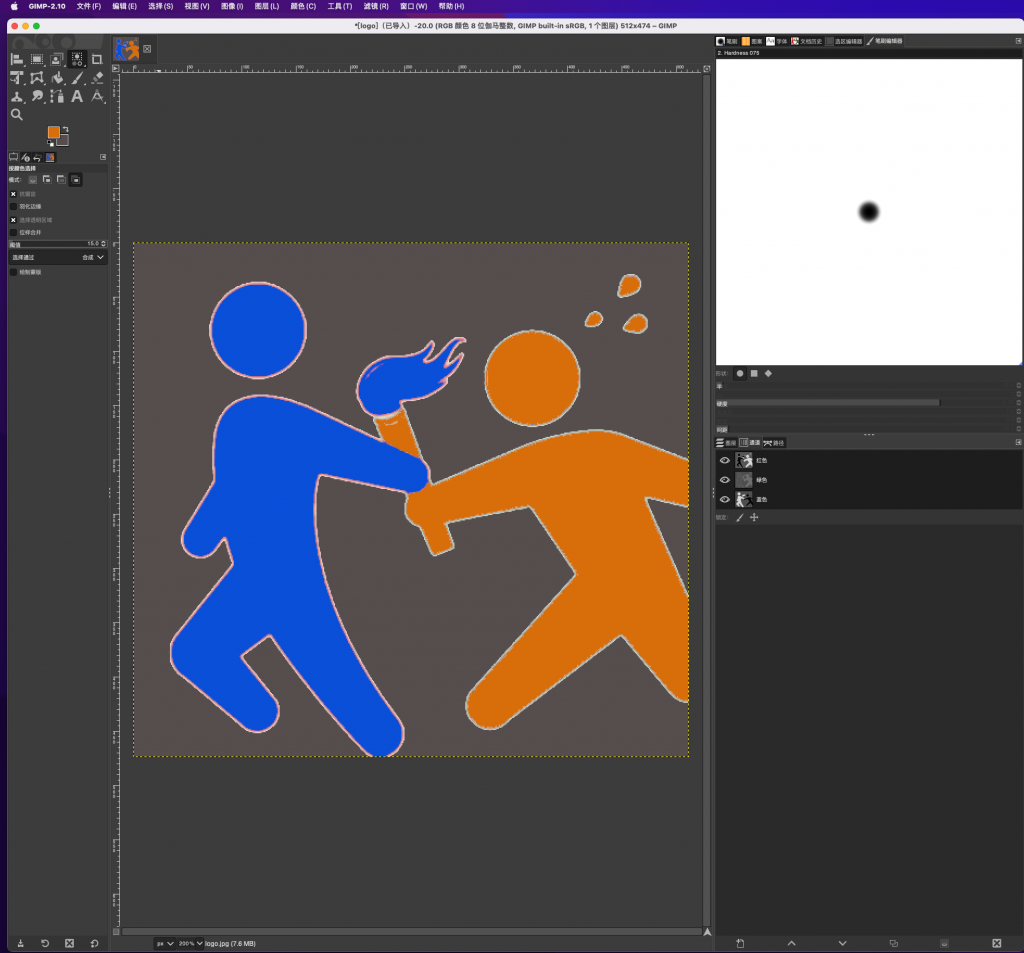
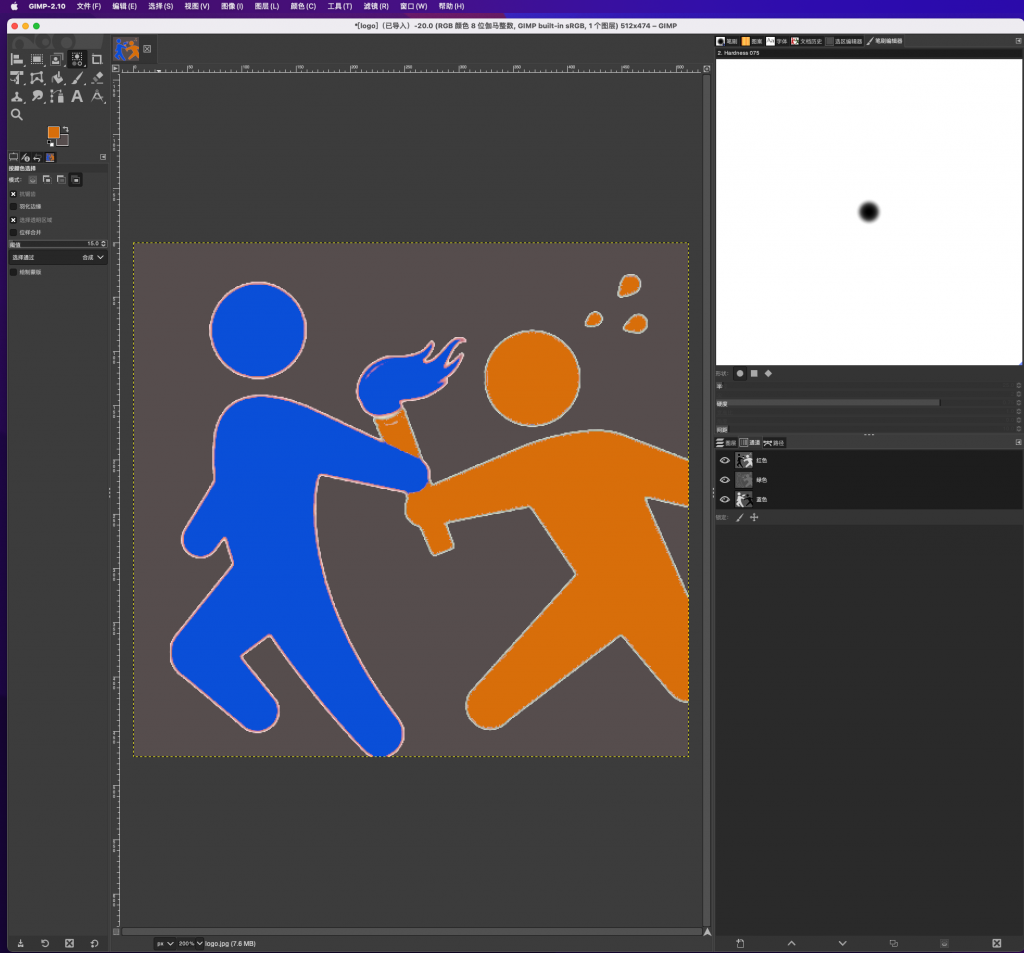
如果是给文字描边、抠图,方法类似。
如果想达到更好的效果,可以搭配MAC系统的图片预览工具使用高清放大能力。
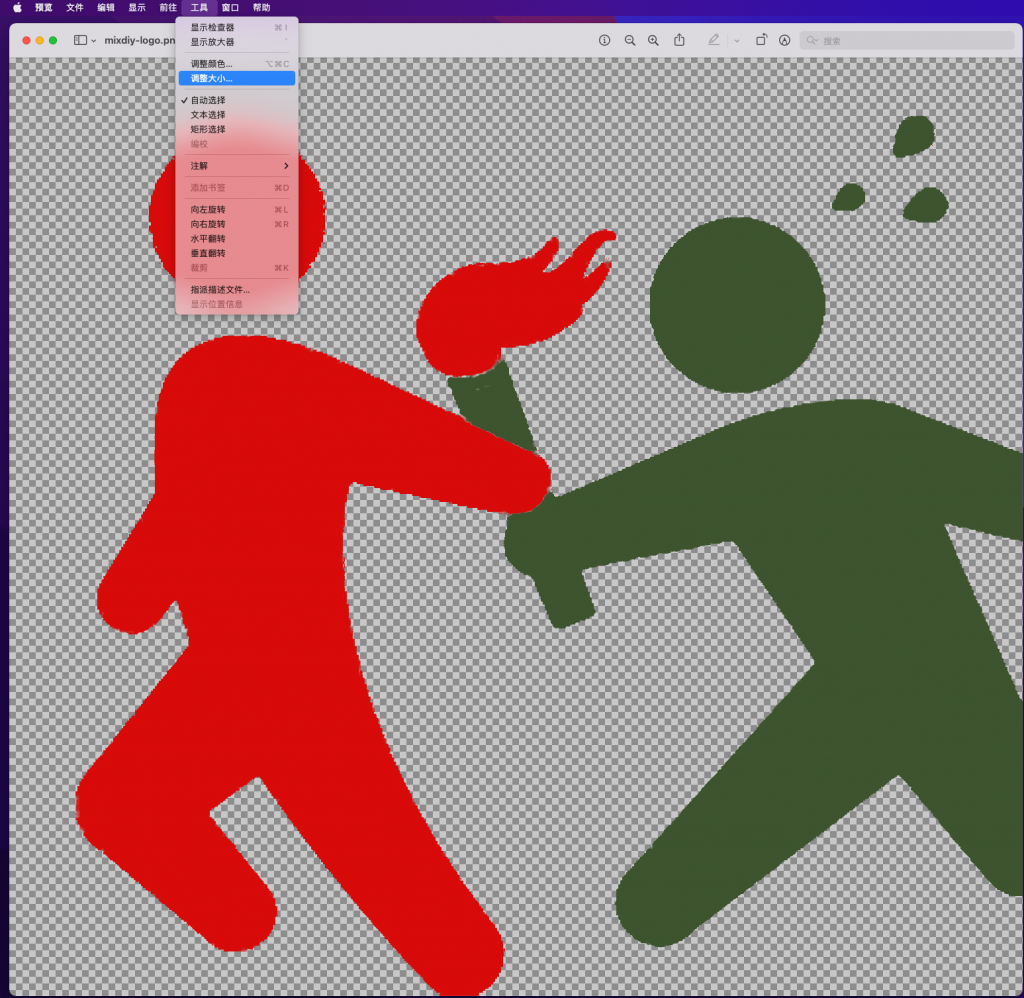
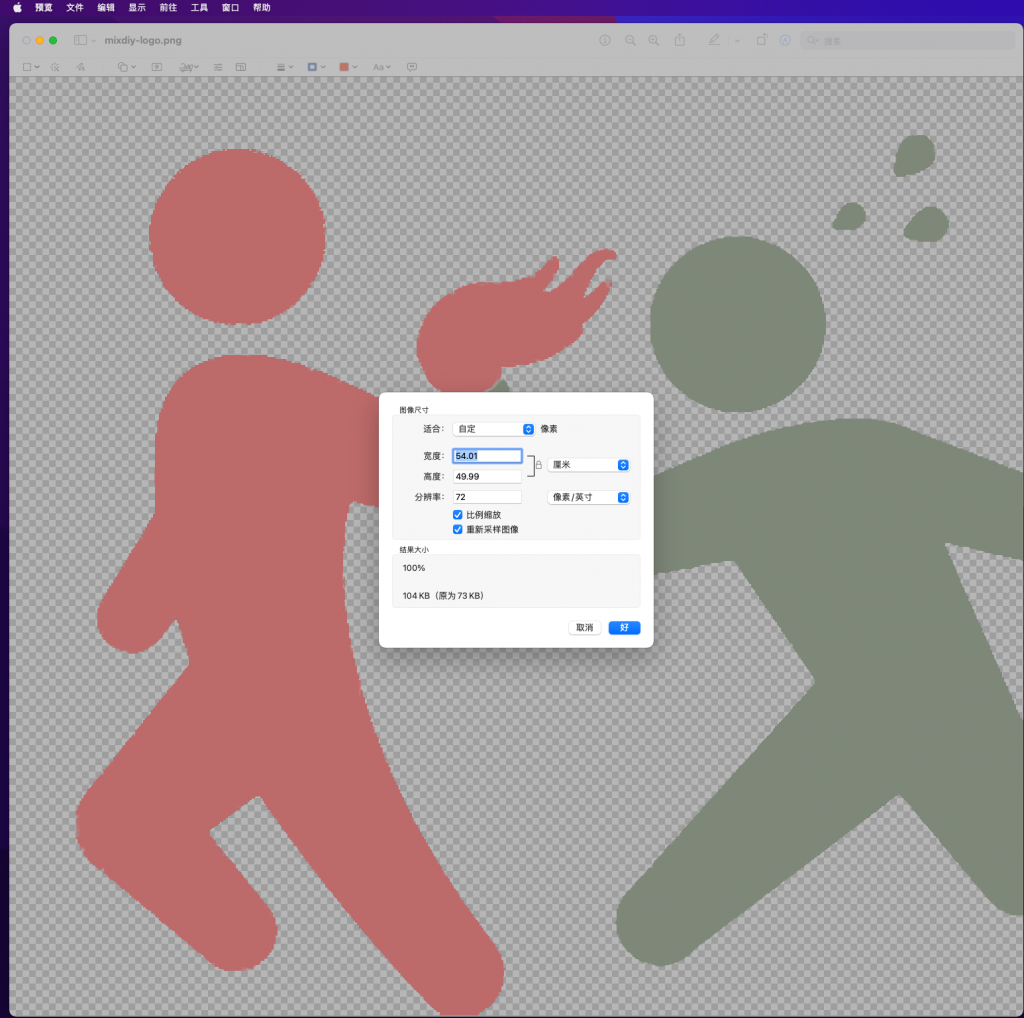
经过上述处理过的图片锯齿小,图片清晰
树莓派安装WordPress总结
树莓派上安装wordpress主要包括以下几个步骤和注意点:
1、烧录树莓派系统到sd卡或emmc
2、更新系统
apt-get update
apt-get upgrade
3、安装php、mysql、wordpress
修改上传文件大小限制
php.ini
sudo nano /etc/php/7.4/apache2/php.ini
修改upload_max_filesize和post_max_size这两处
upload_max_filesize = 50M, 将后面的50M修改为自己想要的大小。
post_max_size = 20M, 将这个20M修改为自己想要的大小
sudo service apache2 restart创建数据库
wordpress
修改版权信息
footer.php
4、安装cpolar(用于远程访问)
5、安装wordpress ssl 插件
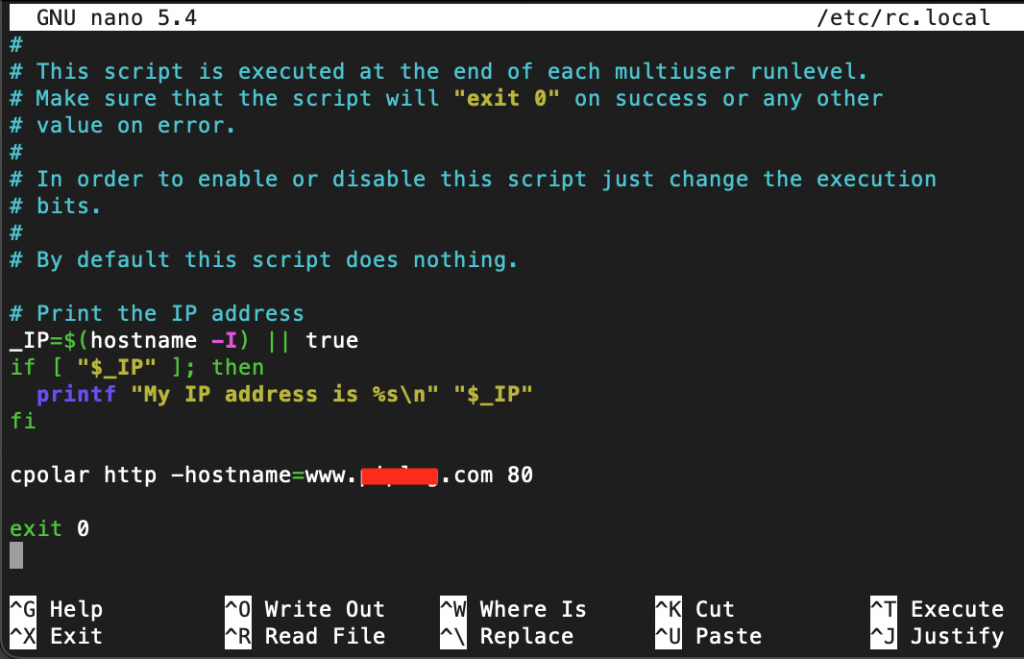
6、修改rc.local设置开机启动
sudo nano /etc/rc.local
7、配置看门狗(非必要,但强烈建议,可以大幅减少不必要的维护)
以上步骤完成后就可以通过wordpress发博客了
附录:
WordPress修改php.ini的方法:首先找到并打开php.ini文件;然后将内容配置为“file _ uploads=onupload _ tmp _ dir等等。最后,保存更改。
wordpressphp . ini修改PHP上传文件大小限制方法详解
打开php.ini,先找到它
file _ uploads=on是否允许通过HTTP上传文件的开关。默认值为开,这意味着开
upload _ tmp _ dir文件将被上传到临时文件在服务器的存储位置。如果未指定,将使用系统默认的临时文件夹
upload _ max _ filesize=8m看文本业务,也就是最大允许文件大小。默认为2M
post _ max _ size=8m指PHP通过表单POST可以接收的最大值,包括表单中的所有值。默认值为8M
一般设置好以上四个参数后,上传一个=8M的文件不是问题,网络正常的时候。
但是如果你想上传8M大的文件,只设置以上四项当然可以。
进一步配置以下参数
max _ execution _ time=600每个PHP页面运行的最大时间值(秒),默认值为30秒
max _ input _ time=600默认情况下,每个PHP页面接收数据所需的最长时间是60秒
memory _ limit=8m默认情况下,每个PHP页面消耗的最大内存是8M。修改以上参数后,在网络允许的正常情况下,可以上传大容量文件
最大执行时间=600
最大输入时间=600
memory_limit=32m
file_uploads=on
upload_tmp_dir=/tmp
upload_max_filesize=32m
用树莓派搭建自定义域名的wordpress网站
这非常适合设置您的第一个网站,不仅可以学习管理 wordpress 站点,还可以学习 Linux。您将需要一个树莓派(Raspberry Pi)、几个小时和一台计算机来下载映像。 树莓派(RPI) 是学习这些东西的完美设备。
还可以查看 RaspberryPi 的官方项目站点
来源: https://projects.raspberrypi.org/en/projects/lamp-web-server-with-wordpress
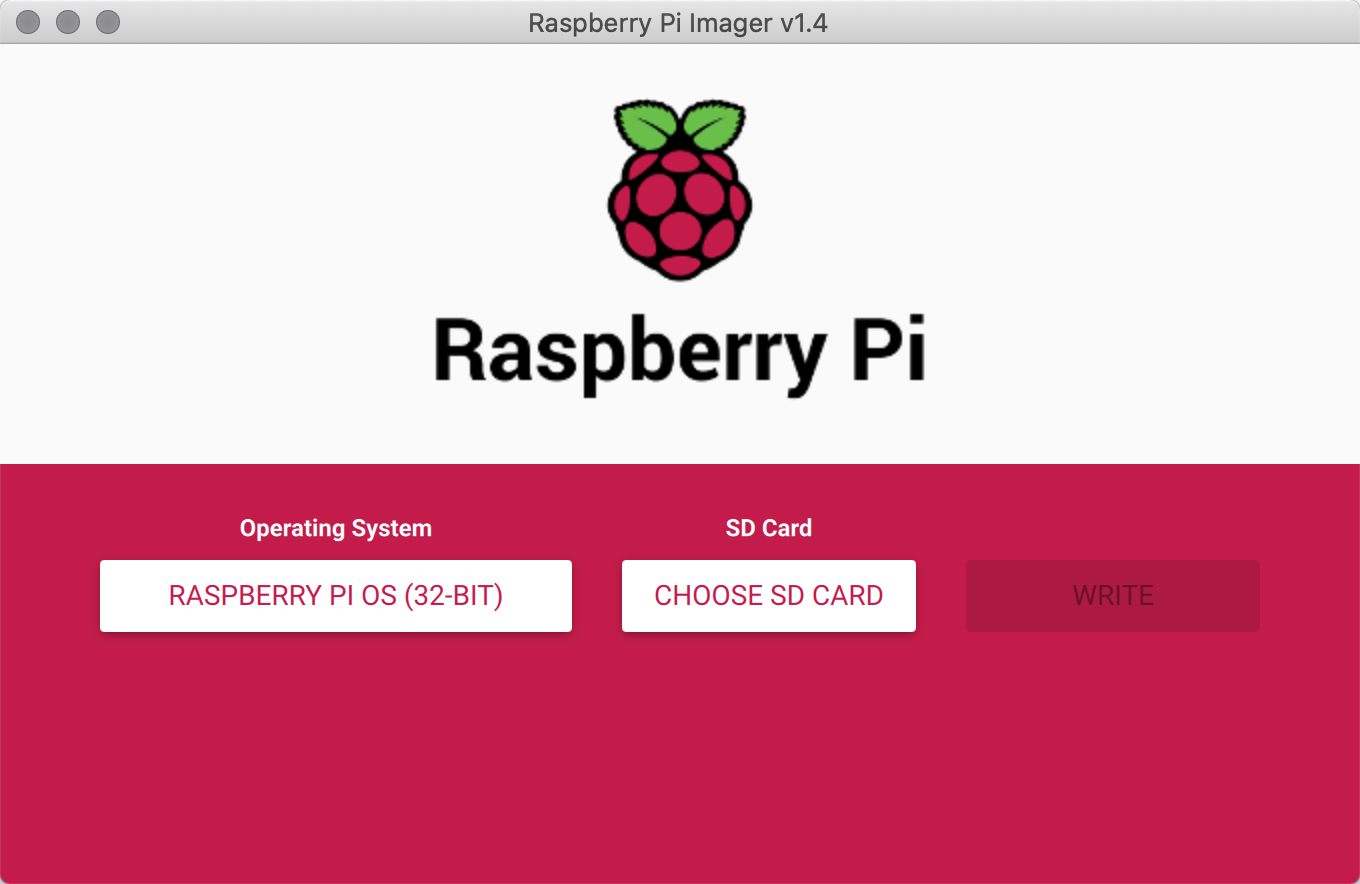
使用 Raspberry Pi Imager 安装 Raspberry Pi OS
下载适用于您的操作系统的树莓派镜像工具。它支持大多数操作系统(Windows、Mac 和 Linux)。
https://www.raspberrypi.org/downloads/
- 运行并安装树莓派镜像工具
- 选择 Raspberry Pi OS -> Raspberry Pi OS (32-bit)
- 将 SD 卡插入计算机
- 点击 Write 按钮
设置 Apache Web 服务器
Apache 是一种流行的 Web 服务器应用程序,您可以将其安装在 Raspberry Pi 上以允许它为网页提供服务。
Apache 本身可以通过 HTTP 提供 HTML 文件。通过附加模块,它可以使用 PHP 等脚本语言提供动态网页。
sudo apt-get install apache2 php -y
sudo service apache2 restart
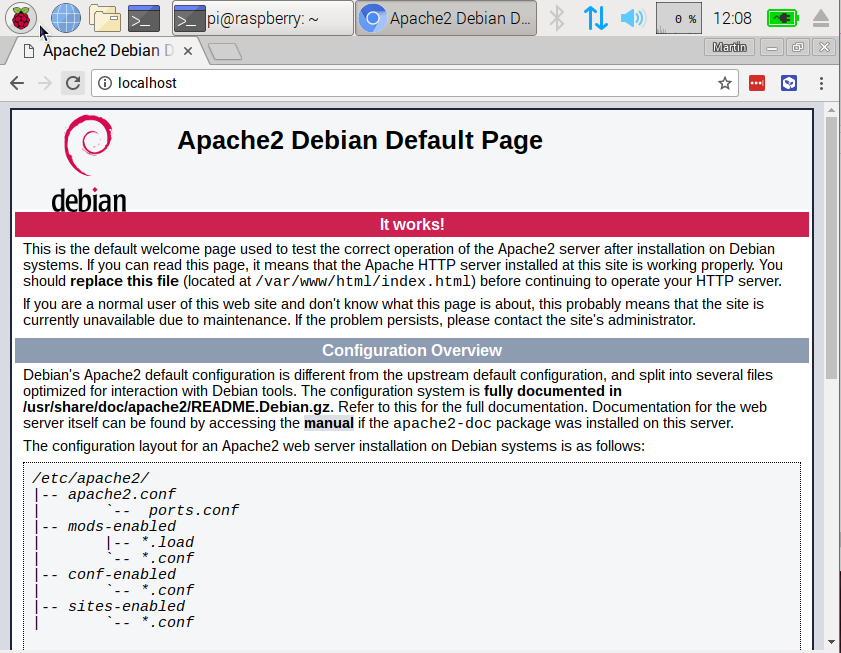
测试 web 站点
默认情况下,Apache 将测试 HTML 文件放在 web 文件夹中,您可以从您的 Pi 或网络上的另一台计算机查看该页面。
在 Raspberry Pi 上打开 Apache 默认网页:
- 通过从菜单中选择 Internet > Chromium Web 浏览器打开 Chromium。
- 输入地址 http://localhost
您应该在浏览器窗口中看到:
安装静态样例站点
为了让站点的内容更有意义,我们部署一个简单的静态演示站点–冥想放松站点。
cd /var/www/html/
sudo rm *
将web站点发布到公网
目前,这个站点只能在局域网站可以被访问,公网用户是访问不到的。要想所有人访问你创建的漂亮站点,我们需要做如下工作。
安装 Cpolar
cpolar是一款内网穿透工具,可以将您的内网站点暴露到公网上,使所有人可以访问到你的站点。
- cpolar一键安装脚本:(国内用户)
curl -L https://www.cpolar.com/static/downloads/install-release-cpolar.sh | sudo bash
- 或短链接安装方式:(国外用户)
curl -sL https://git.io/cpolar | sudo bash
- 查看cpolar版本信息
cpolar version
如果正常显示,则安装成功
cpolar进行token认证
如果您还没有cpolar账号,请去cpolar官网注册并登录后台获取认证token
cpolar authtoken xxxxxxxxxxxxxxxxxx
生成cpolar随机域名网址
cpolar http -region=cn_vip 80
上图显示,cpolar将内网站点,发布到了一个随机域名网址:https://711d7522.vip.cpolar.cn
- 我们打开浏览器试一下:https://711d7522.vip.cpolar.cn
现在,我们已经发布了内网的web站点到公网,任何人都可以访问到它。
回到终端窗口,按CTRL+C键,退出cpolar
此时,公网地址不再能被访问。
生成cpolar二级子域名
虽然已经发布到公网,但域名是随机变化的,只适合临时测试使用。如果要长期使用,我们要配置二级子域名。
操作步骤:
- 升级到cpolar基础套餐
- 登录到cpolar后台–>预留–>保留二级子域名,例如添加
dev9,地区选择VIP China地区
在前台终端测试域名
cpolar http -subdomain=dev9 -region=cn_vip 80
ShellCopy
如果显示正常,则说明我们已经配置好了。
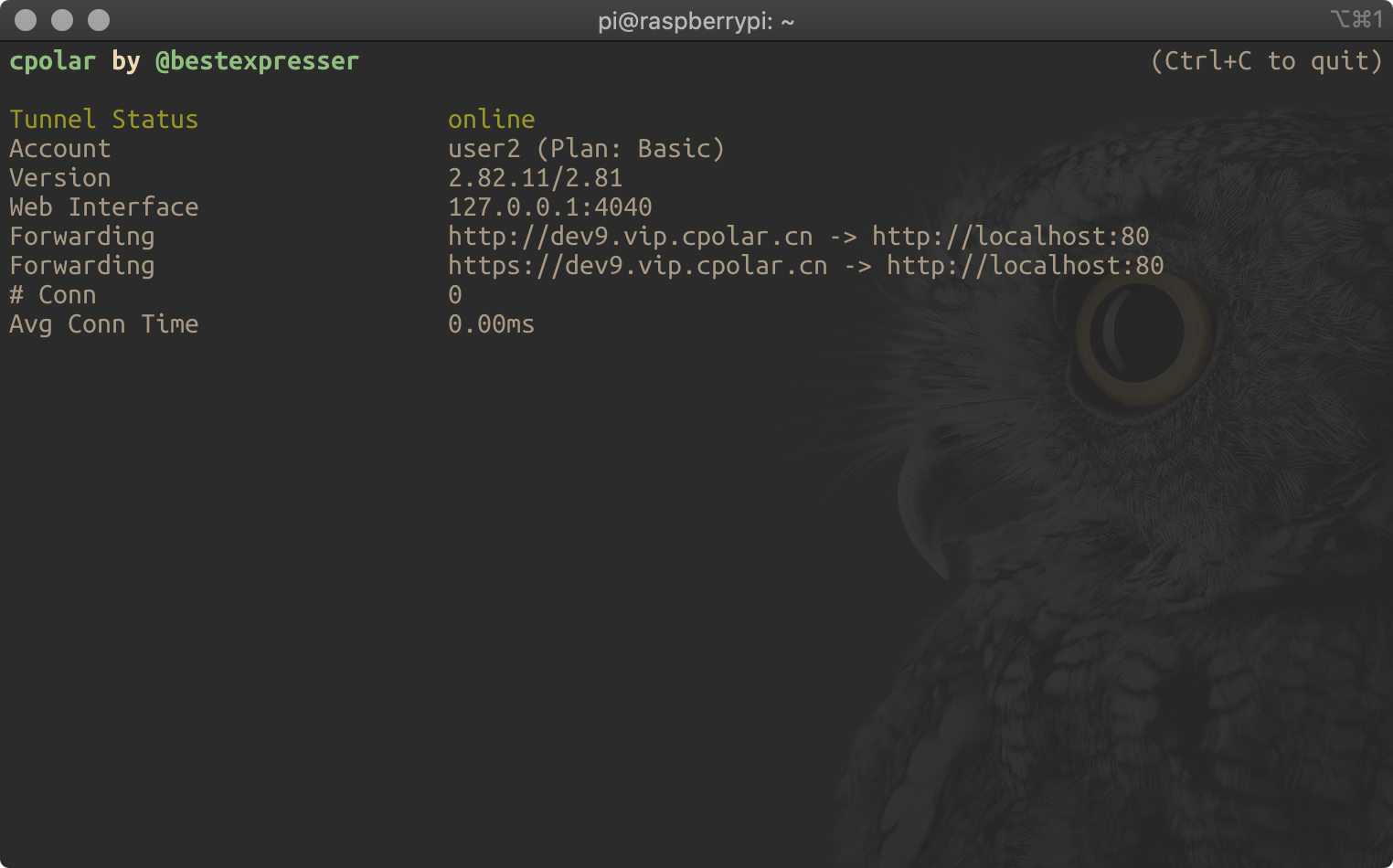
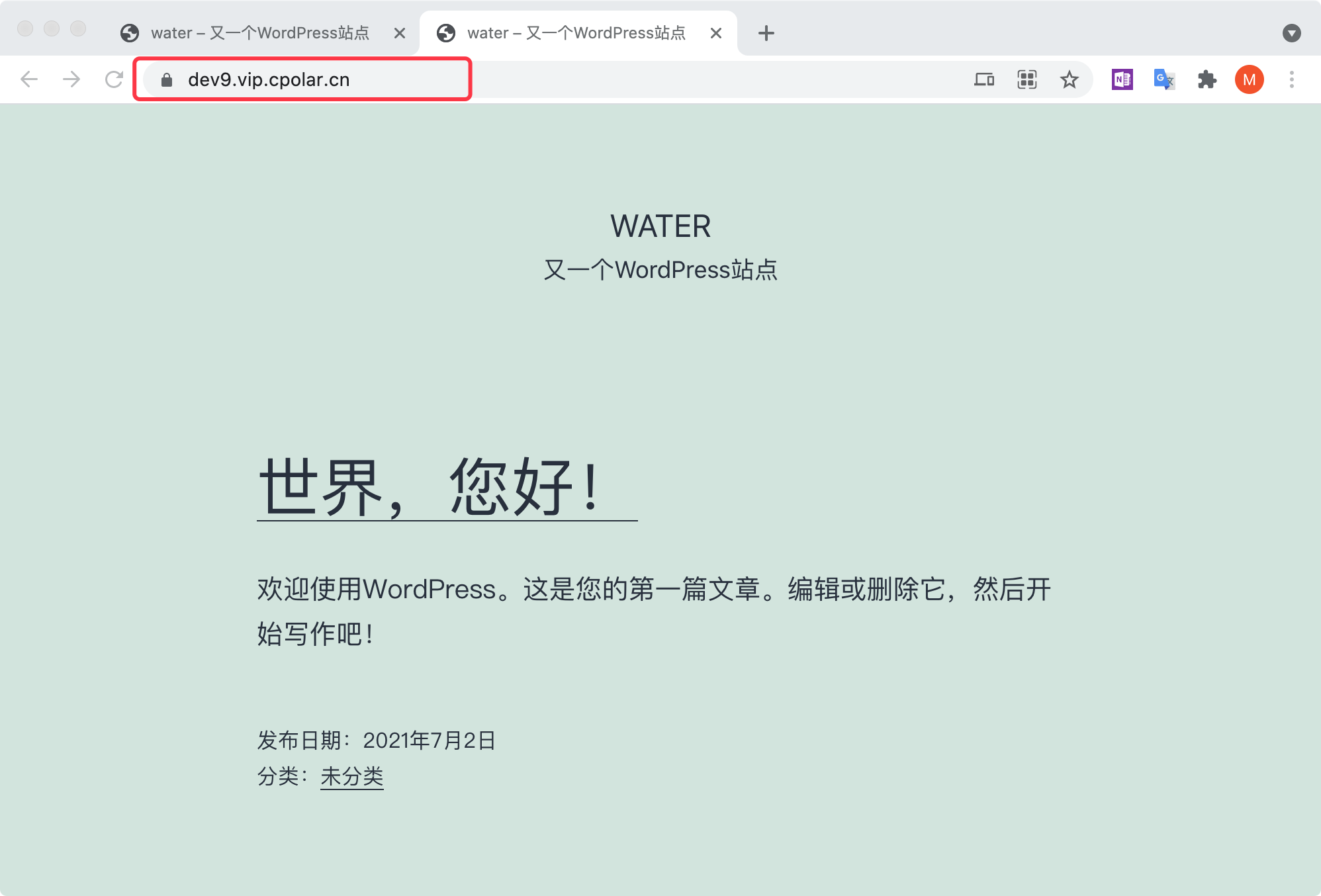
用新的域名在浏览器里访问:https://dev9.vip.cpolar.cn
正常则说明我们的固定二级子域名配置好了。
将参数保存到cpolar配置文件中
刚刚我们在前台运行cpolar程序,关掉后,域名消失,现在我们将参数保存到配置文件中。以支持开机后台自启动运行。
- 编辑配置文件
nano /usr/local/etc/cpolar/cpolar.yml
ShellCopy
如图:
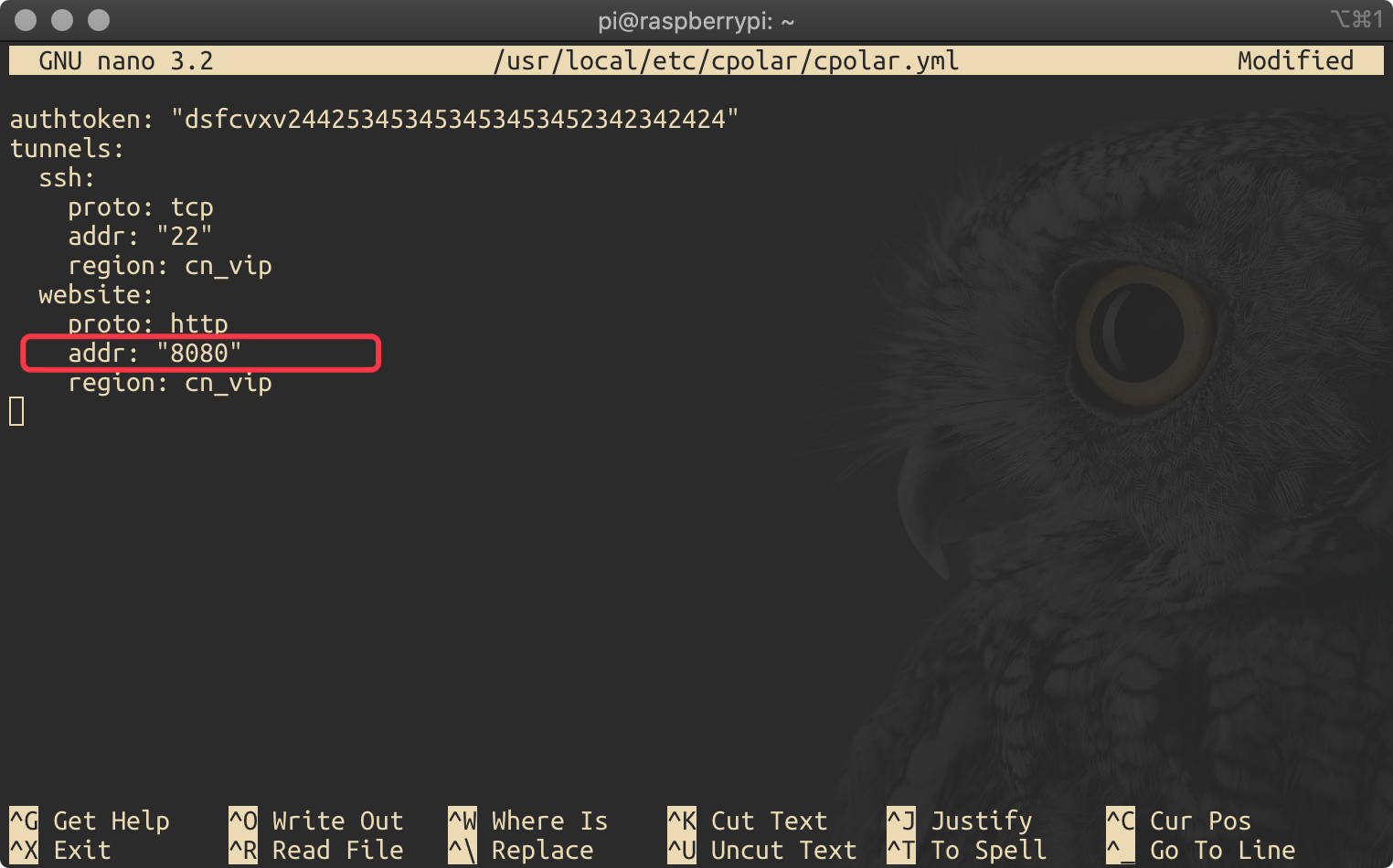
上图为样例配置文件,它会配置两个默认隧道:一个ssh隧道和一个website隧道。
参数说明:
authtoken: xxxxxxxxxxxx #认证token
tunnels:
ssh: #隧道名称,表示ssh,名称可以自定义
addr: 22 #端口号为22
proto: tcp #协议tcp
region: cn_vip #地区,cn_vip,可选:us,hk,cn,cn_vip
website: #隧道名称,用户可以自定义,但多隧道时,不可重复
addr: 8080 #本地Web站点端口
proto: http #协议http
region: cn_vip #地区,cn_vip,可选:us,hk,cn,cn_vip
YAMLCopy
本例中,我们需要修改如下内容:
- 将website隧道的默认
8080端口修改为80 - 添加一行
subdomain: "你的二级子域名"
修改后的效果如图:
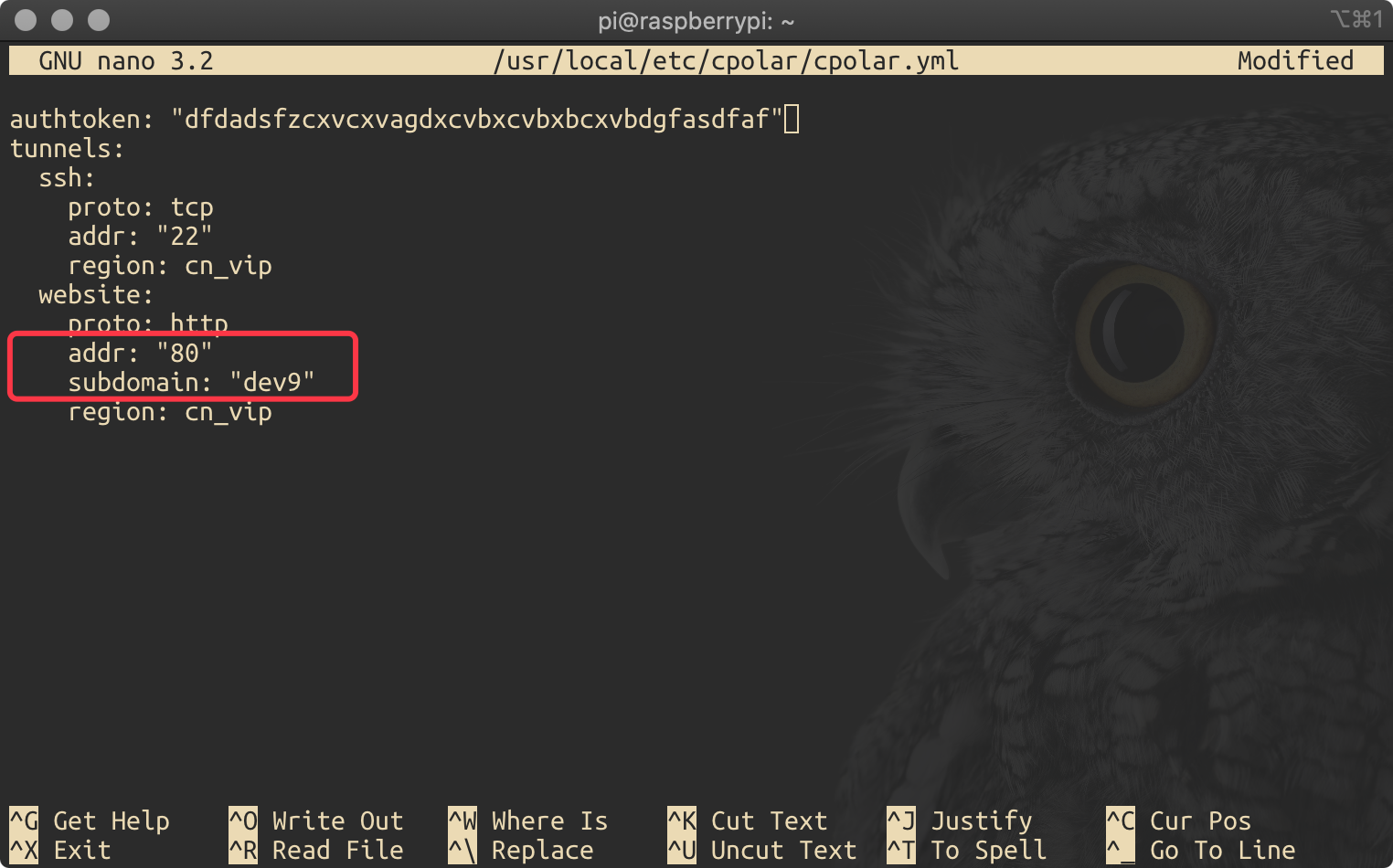
注意: 配置文件是yaml格式的,缩进敏感,而且不能有TAB键。
然后按CTRL+X,退出,提示你是否保存,回答Y,确认保存文件路径,回车
测试修改后配置文件
在前台启动所有隧道测试
cpolar start-all
ShellCopy
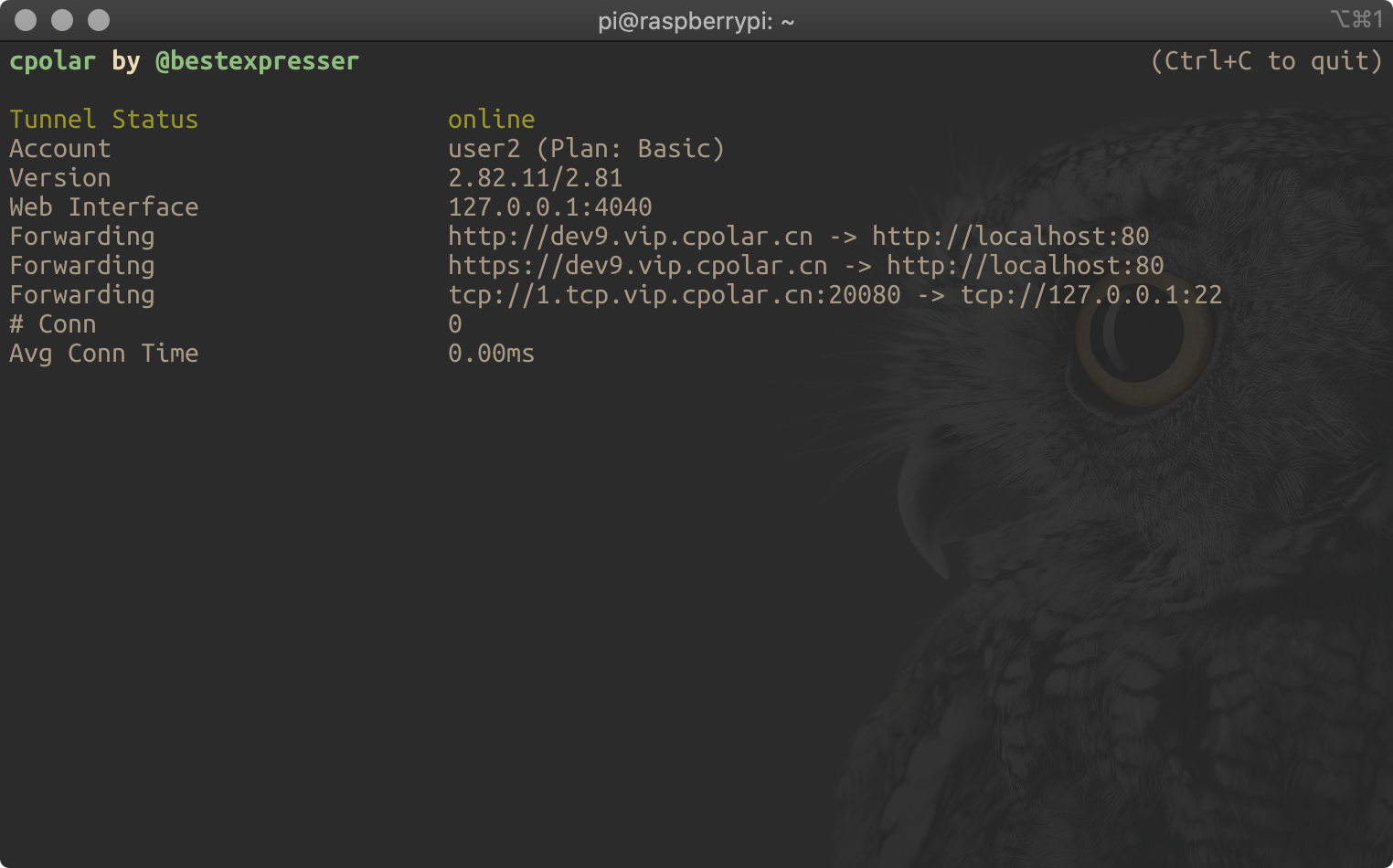
如上图显示,则为正常,按CTRL+C退出
如果报错,会提示配置文件某行有错误,请重新修改。直到类似上图正确输出。
配置cpolar服务开机自启动
- 配置cpolar开机自启动
sudo systemctl enable cpolar
ShellCopy
- 守护进程方式,启动cpolar
sudo systemctl start cpolar
ShellCopy
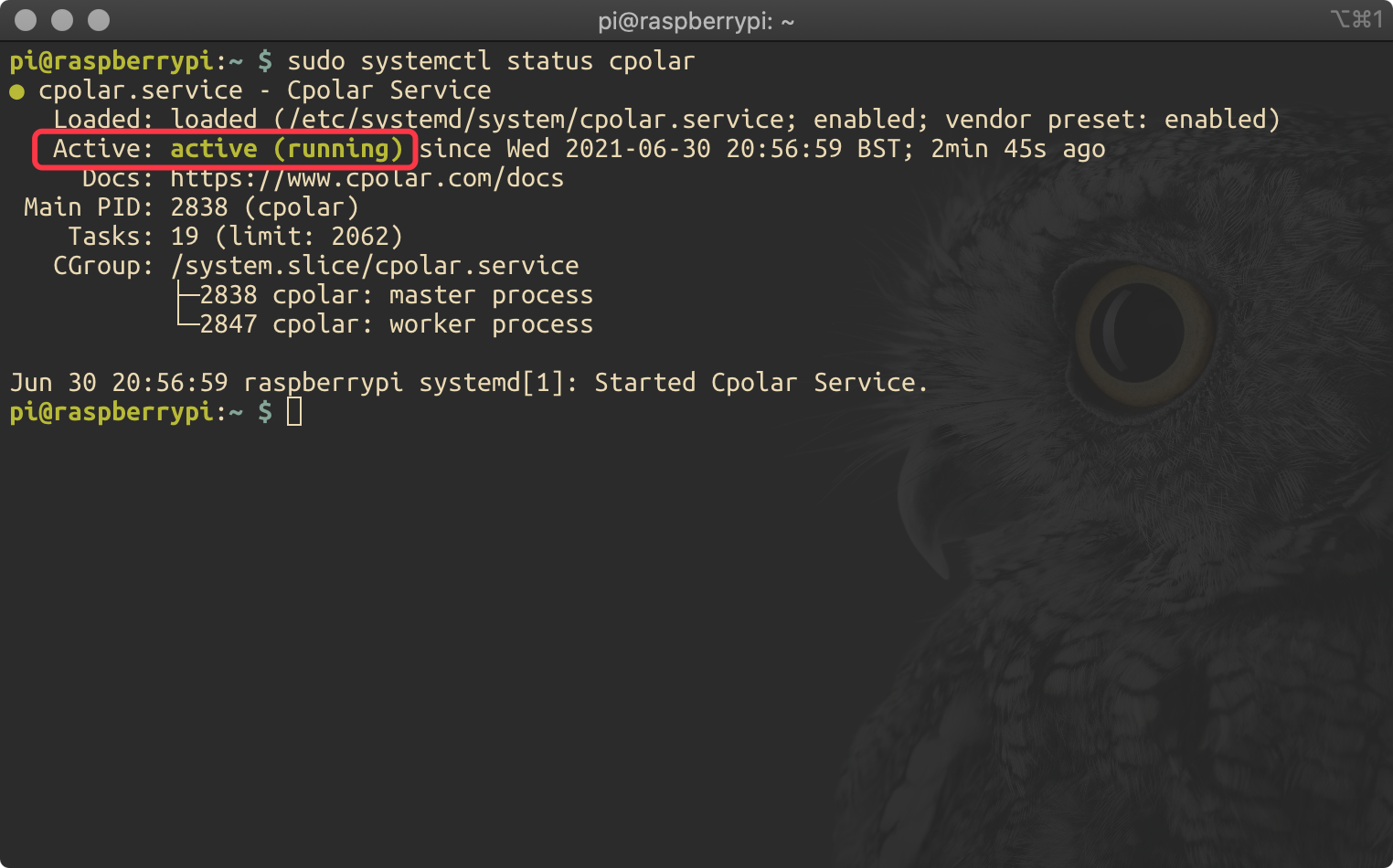
- 查看cpolar守护进程状态
sudo systemctl status cpolar
ShellCopy
如图说明,启动状态成功
- 重新启动
sudo reboot
ShellCopy
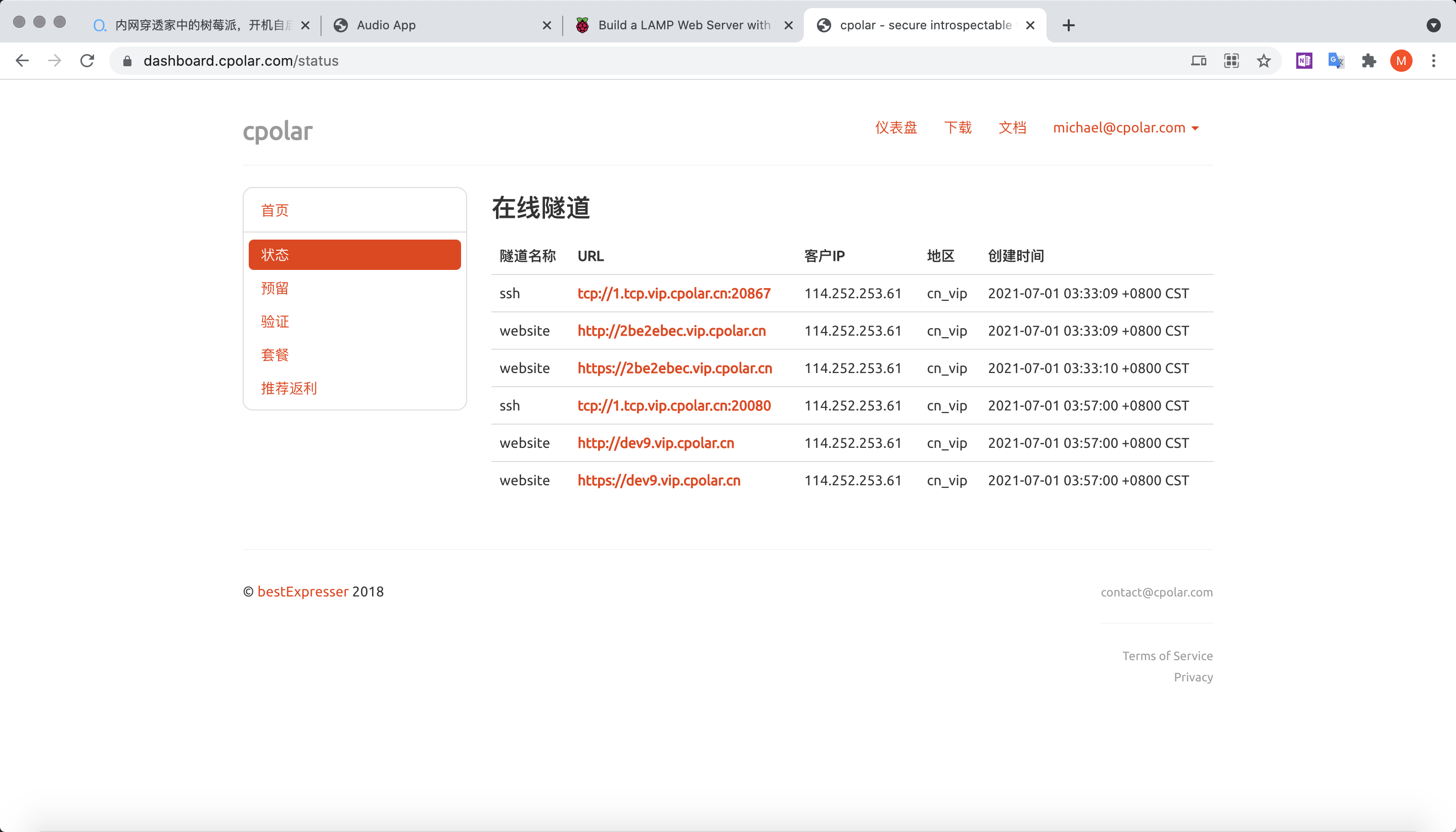
重启后,检查cpolar隧道是否仍在线
访问后台–>状态 https://dashboard.cpolar.com/status
如图说明配置成功
安装 PHP
- 更新到最新仓库
sudo apt-get update -y
- 安装 apache2 php
sudo apt-get install apache2 php -y
- 重启 apache2 服务
sudo service apache2 restart
安装MySQL数据库
sudo apt-get install mariadb-server php-mysql -y
sudo service apache2 restart
安装 WordPress
cd /var/www/html/
- 删除旧静态站点内容
sudo rm -rf *
- 下载最新的wordpresss压缩包
sudo wget http://wordpress.org/latest.tar.gz
- 解压
sudo tar xzf latest.tar.gz
sudo mv wordpress/* .
sudo rm -rf wordpress latest.tar.gz
- 配置目录权限
sudo chown -R www-data: .
设置您的 WordPress 数据库
设置 MySQL/MariaDB
sudo mysql_secure_installation
- 此时系统会询问你:Enter current password for root (enter for none): , 按回车(enter) 键,因为第一次登陆是没有密码的。
- 然后会询问你: Set root password? —— 按 Y ,进行root帐号的密码设置
- 此时,会提示 New password ,在此输入你的MySQL密码,重要:请牢记这个密码,输入完成按回车,会提示re-enter new password此时再重复输入密码,回车即可。
- 然后,询问你 Remove anonymous users ,按 Y 。
- 然后,询问你 Disallow root login remotely ,按 Y 。
- 然后,询问你 Remove test database and access to it ,按 Y 。
- 然后,询问你 Reload privilege tables now ,按 Y 。
- 最后,您将看到消息 All done! 和 Thanks for using MariaDB! 。表示已经设置完成了。
创建 WordPress 数据库
sudo mysql -uroot -p
- 输入您创建的 root 密码。
create database wordpress;
- 现在将数据库权限授予 root 用户。注意:您需要在
IDENTIFIED BY后输入您自己的密码。
GRANT ALL PRIVILEGES ON wordpress.* TO 'root'@'localhost' IDENTIFIED BY 'YOURPASSWORD';
重要提示:将上面的 YOURPASSWORD 更改为您的密码。
- 为了使更改生效,您需要刷新数据库权限:
FLUSH PRIVILEGES;
- 退出 MariaDB :
exit
重新启动树莓派
sudo reboot
WordPress configuration
- 在您的 Pi 上打开 Web 浏览器并转到 http://localhost,您应该会看到一个 WordPress 页面,要求选择您的语言。
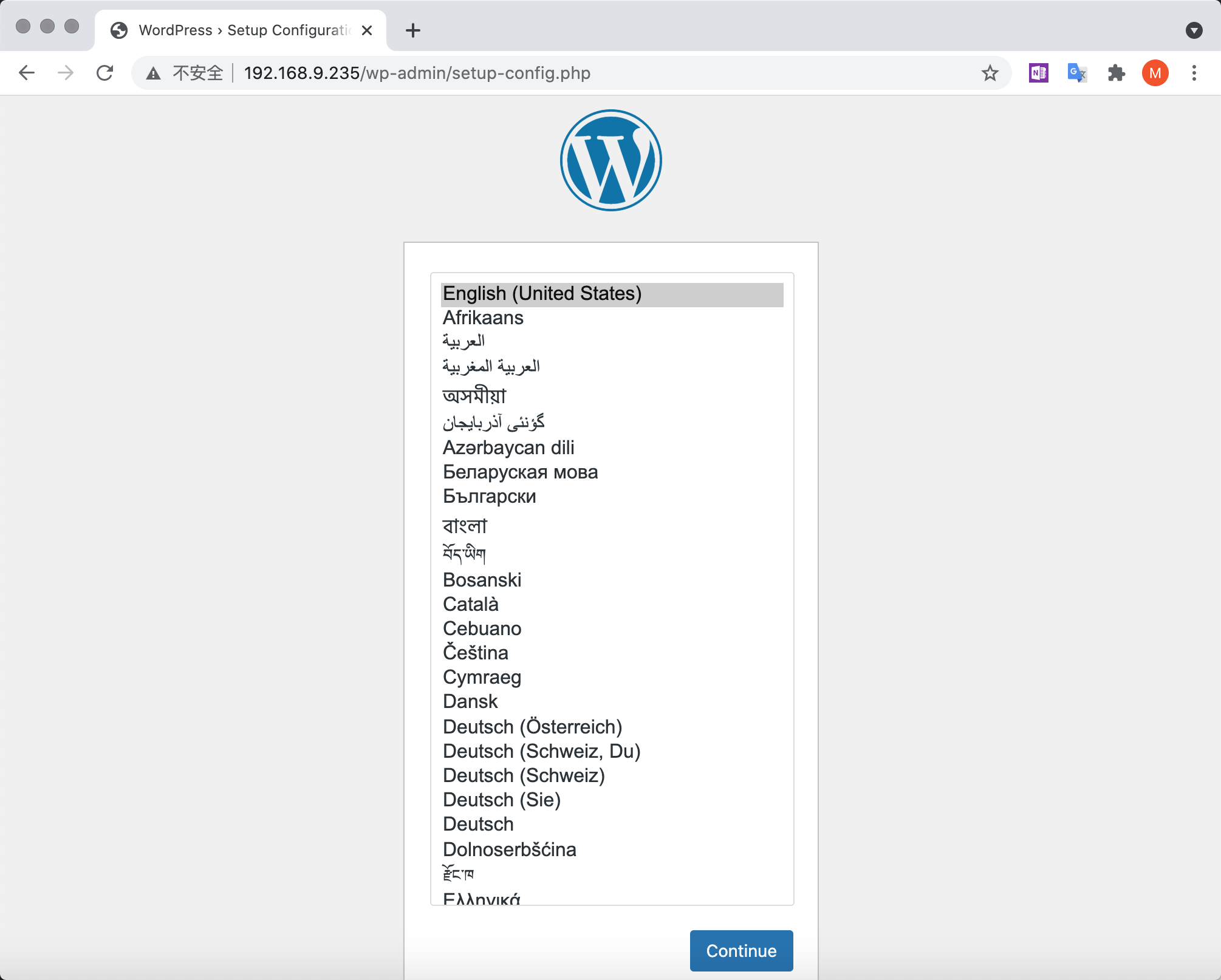
- 选择您的语言,然后单击
Continue按钮。
您将看到 WordPress 欢迎屏幕

- 点击
现在就开始!按钮。 - 现在填写网站基本信息如下:
Database Name: wordpress
User Name: root
Password: <YOUR PASSWORD>
Database Host: localhost
Table Prefix: wp_
- 单击
提交继续。 - 单击
运行安装程序按钮。
现在你越来越近了!

填写信息:为您的站点命名,创建用户名和密码,然后输入您的电子邮件地址。点击 安装 WordPress 按钮,然后使用您刚刚创建的帐户登录。
现在您已登录并设置了站点,您可以通过访问 http://localhost/wp-admin 来查看该网站。
登录管理后台:
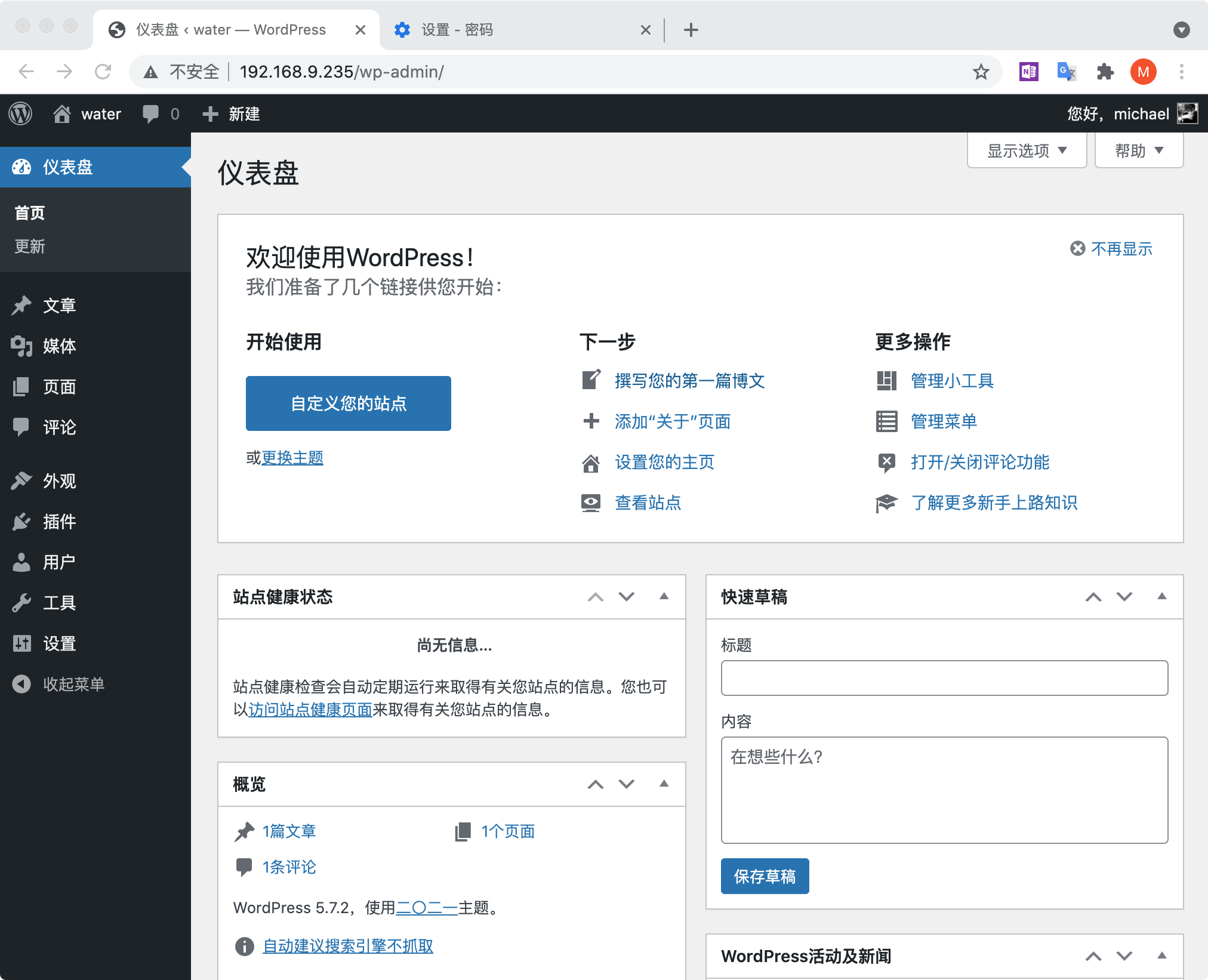
将WordPress站点发布到公网
我们用cpolar将WordPress发布到公网前,通常需要做两件事:
安装相对URL插件
您必须确保WordPress发布为相对URL。
您可以通过安装以下插件之一来完成此操作
- https://github.com/optimizamx/odt-relative-urls
- http://wordpress.org/plugins/relative-url/
- http://wordpress.org/plugins/root-relative-urls/
本例中,我们安装Relative URL插件:
- 登录WordPress
仪表盘–>插件–>安装插件
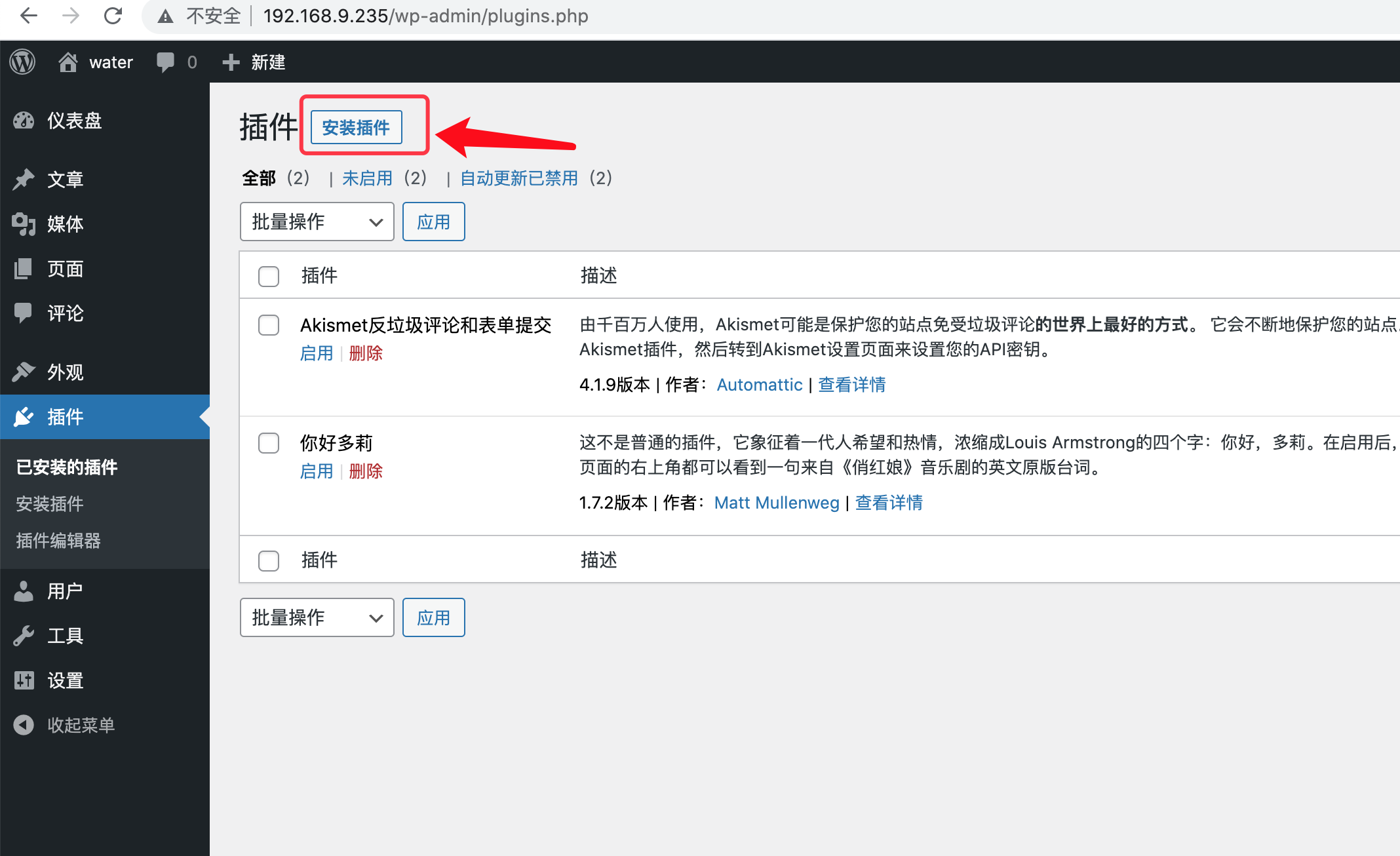
- 在关键词搜索栏输入
Relative URL回车
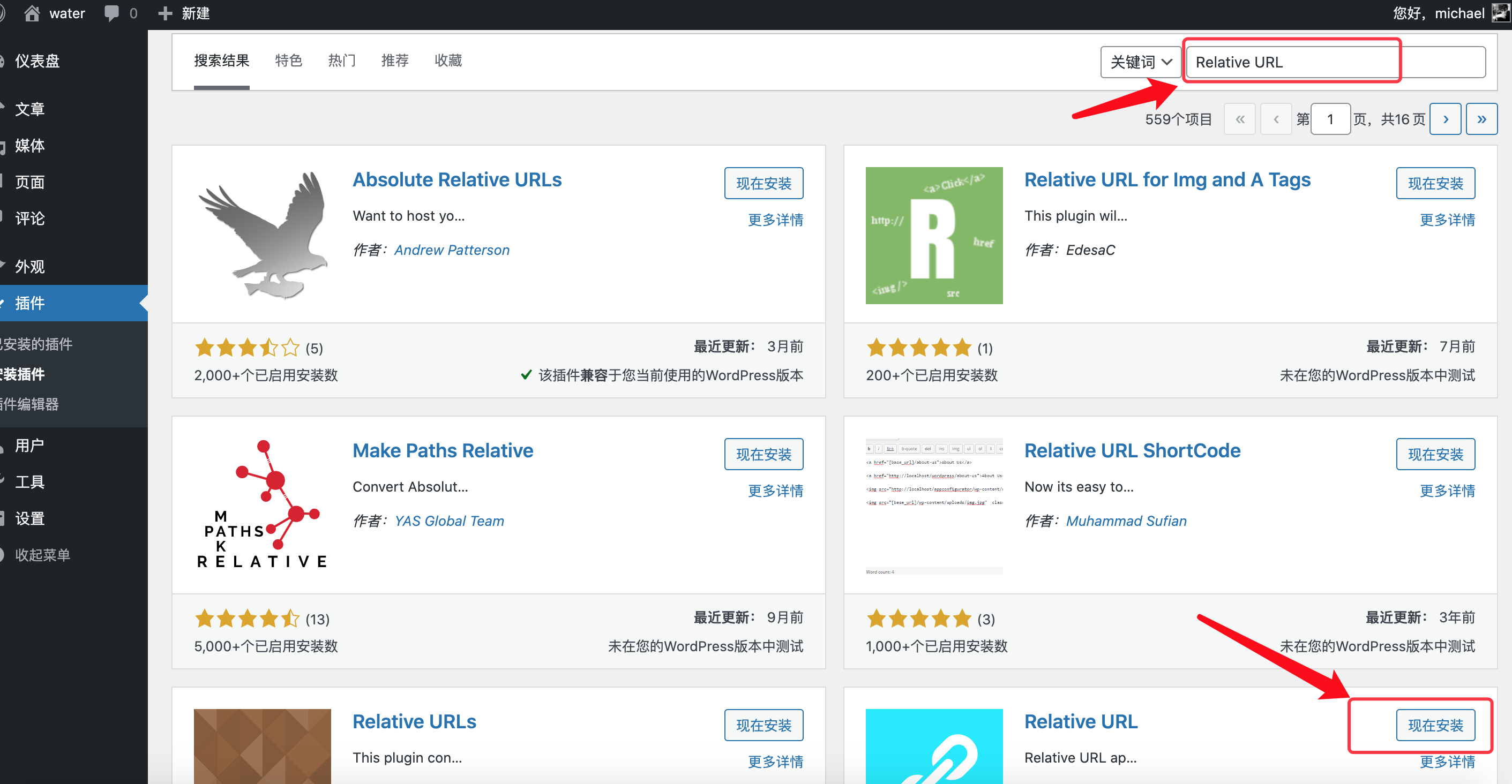
- 找到插件后点击
现在安装按钮 - 当安装成功后,点击
启用按钮,激活插件。
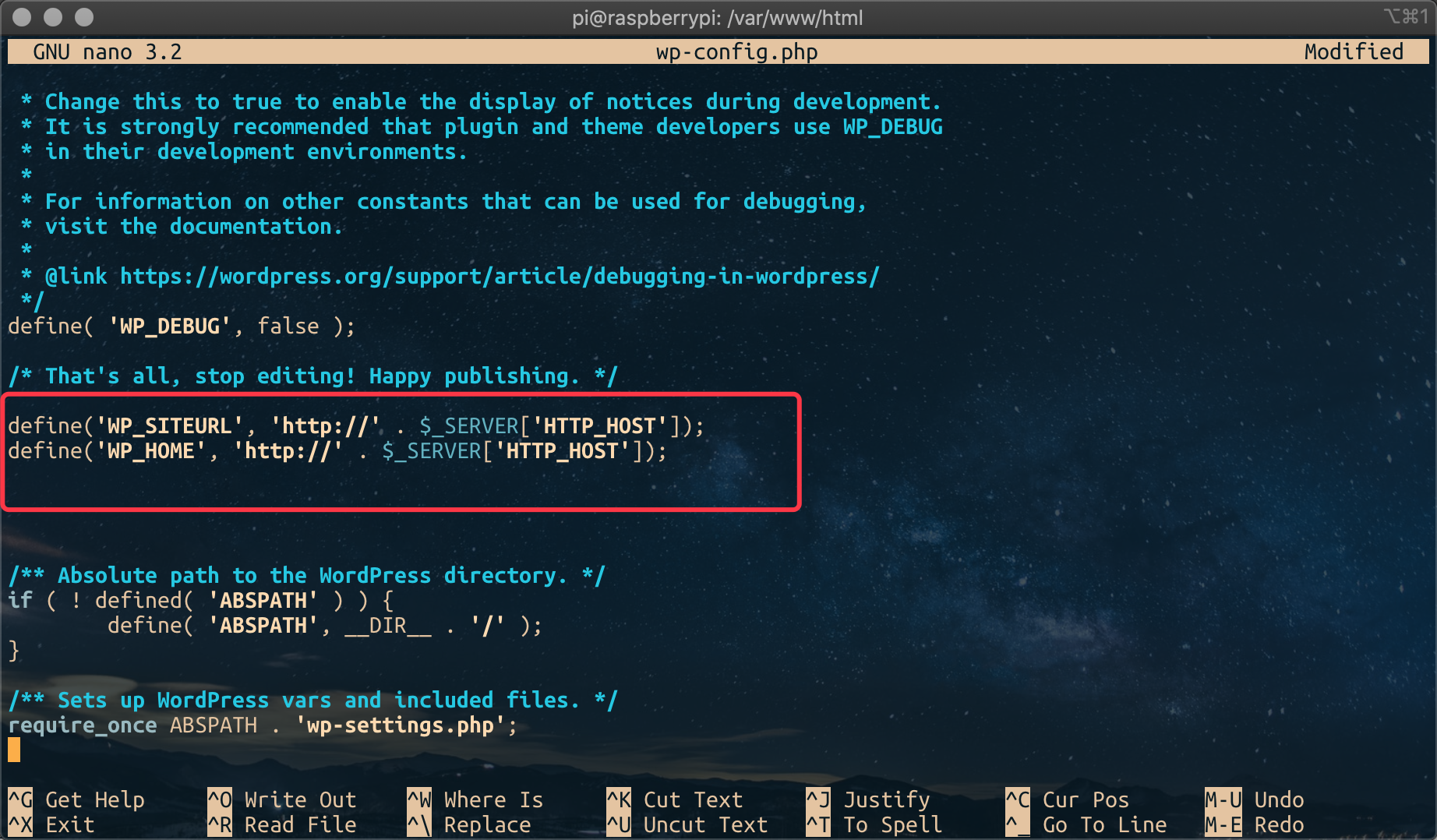
修改config.php配置
您必须确保Wordpress了解它是为了通过隧道主机名提供服务。 您可以通过修改wp-config.php来配置Wordpress以包含以下行:
define('WP_SITEURL', 'http://' . $_SERVER['HTTP_HOST']);
define('WP_HOME', 'http://' . $_SERVER['HTTP_HOST']);
CodeCopy
- 修改wp-config.php文件
sudo nano /var/www/html/wp-config.php
ShellCopy
配置好以后如图:
现在,我们的博客站点可以被公网正常访问啦!让我们看看效果:
支持好友链接样式
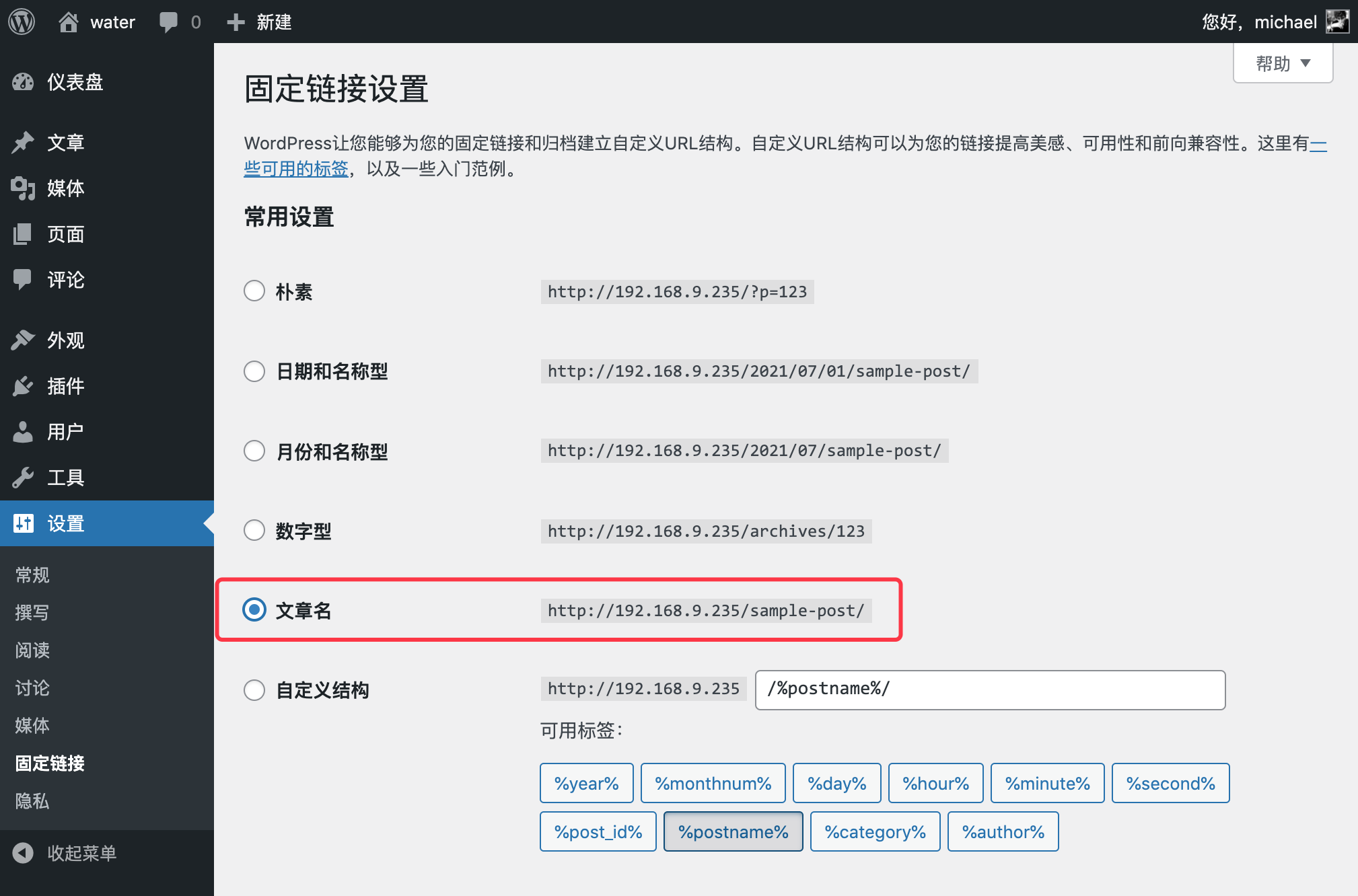
建议您更改永久链接设置以使您的 URL 更友好。
为此,请登录 WordPress 并转到仪表盘。
转到设置,然后转到固定链接。
选择文章名选项,然后单击保存更改。
您需要启用 Apache 的重写模块:
sudo a2enmod rewrite
ShellCopy
您还需要告诉为该站点提供服务的虚拟主机允许覆盖请求。
- 编辑虚拟主机的 Apache 配置文件:
sudo nano /etc/apache2/sites-available/000-default.conf
ShellCopy
- 在第 1 行之后添加以下几行。
<Directory "/var/www/html">
AllowOverride All
</Directory>
CodeCopy
- 确保它在
<VirtualHost *:80>中,如下所示:
<VirtualHost *:80>
<Directory "/var/www/html">
AllowOverride All
</Directory>
...
CodeCopy
- 保存文件并退出。
- 重新启动Apache.
sudo service apache2 restart
ShellCopy
定制主题
WordPress 是非常可定制的。通过在页面顶部的 WordPress 横幅中单击您的站点名称(当您登录时),您将被带到仪表板。从那里,您可以更改主题、添加页面和帖子、编辑菜单、添加插件等等。这只是在 Raspberry Pi 的 Web 服务器上设置一些有趣的东西的品尝器。
下面,我们更换一个主题试试。
- WordPress仪表盘–>外观–>主题
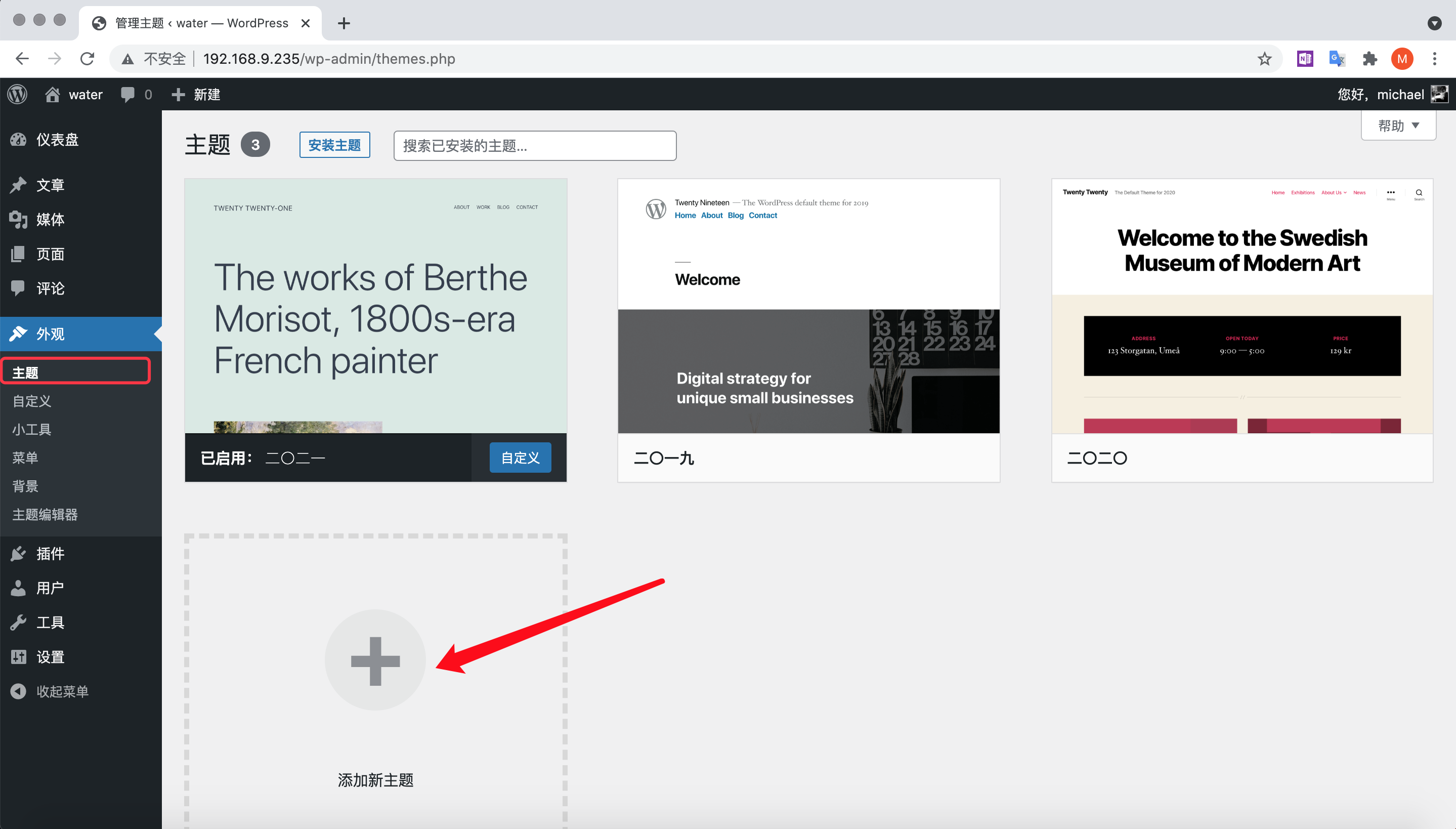
- 点击热门,选择一个自己喜欢的主题,点击
安装按钮
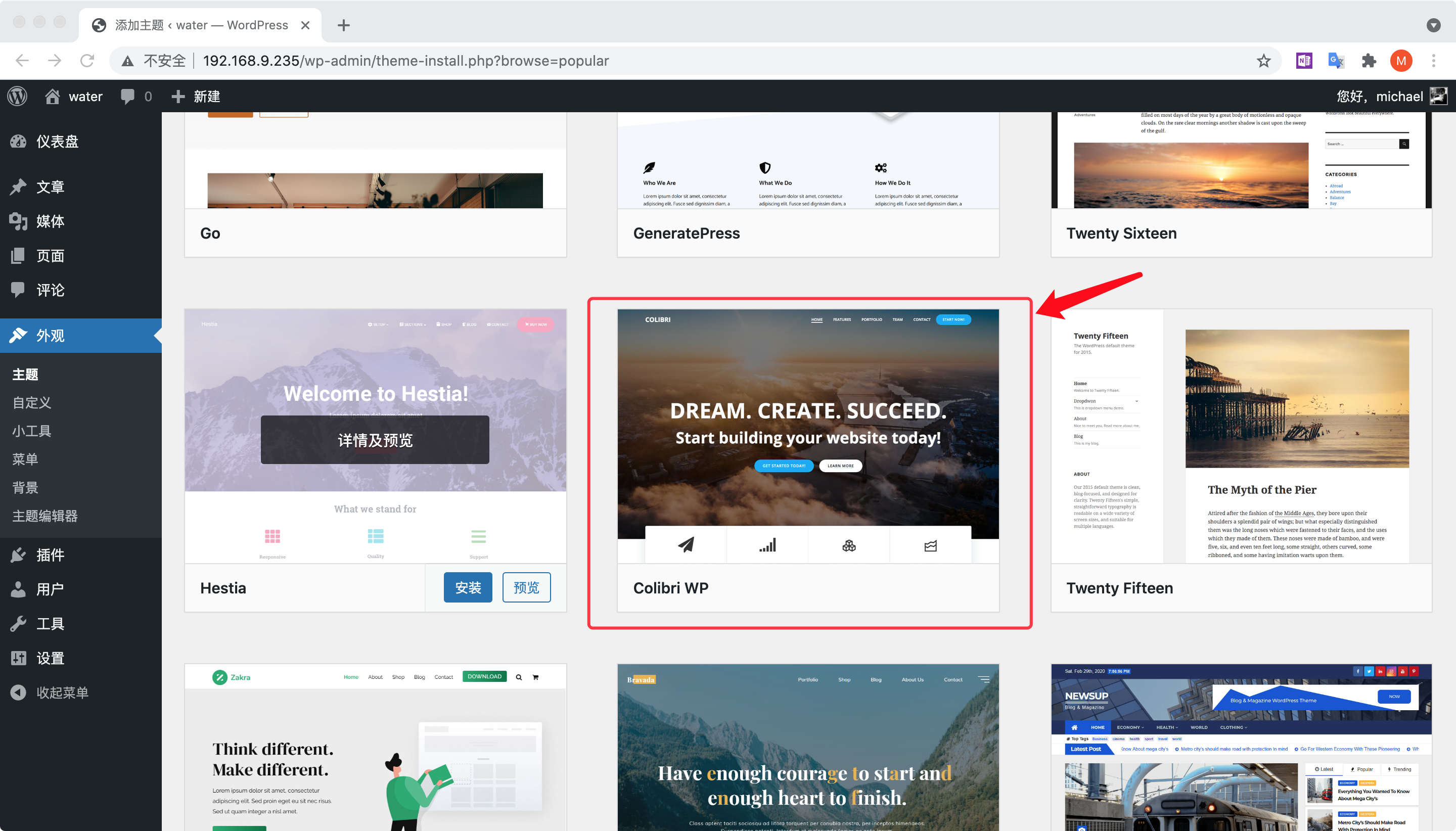
- 主题安装成功后,点击
启用按钮。 - 让我们重新打开站点,看一下效果:
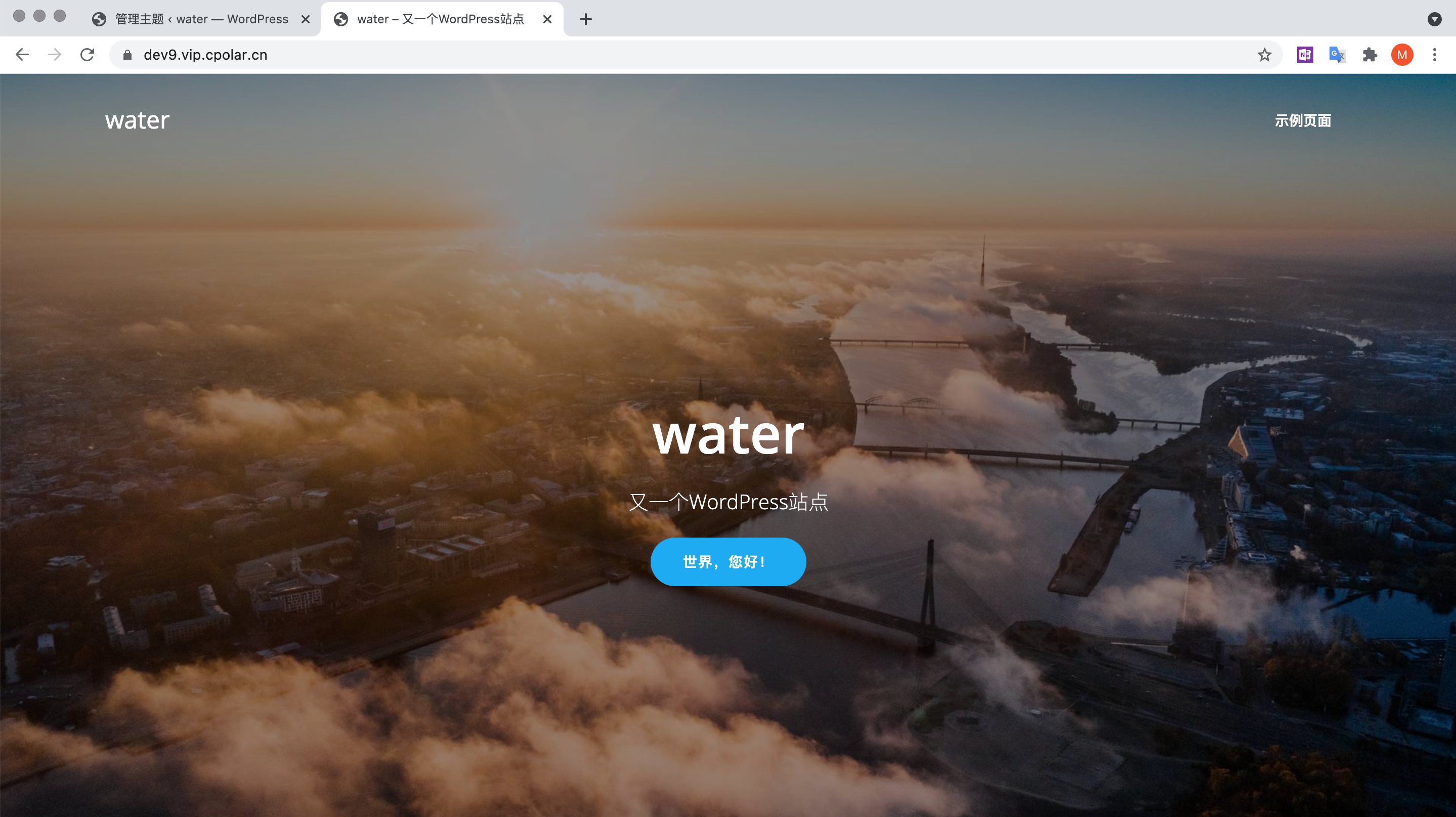
现在,您的站点已经建好了,您可以进一步体验更多的主题,慢慢探索吧。
密码保护:cpolar.yml
wordpress 网站安装ssl证书
首先需要通过wordpress后他安装ssl插件,这里选择realy simple ssl,安装完成后下载证书等文件到指定目录,然后执行以下命令即可
cpolar http -hostname=secure.example.com -key=/path/to/tls.key -crt=/path/to/tls.crt 80
树莓派安装cURL
树莓派的部分插件需要cURL依赖,比如ssl,目前网上提供的方式非常单一,基本如下:
wget http://curl.haxx.se/download/curl-7.80.0.tar.gz
2. tar -xzvf curl-7.80.0.tar.gz
3. cd curl-7.80.0/
4. ./configure 耗时2分钟左右
5. make
6. sudo make install
以上方式实际使用安装过程麻烦而且易出问题,现提供一个简单的方式:
sudo apt-get install php7.4-curl (我用的是php7.4,各位根据自己的版本修改即可)
安装完成后需要重启apache
sudo service apache2 restart树莓派上安装WordPress
WordPress 是一个非常受欢迎的开源博客平台和内容管理平台(CMS)。它很容易搭建,而且还有一个活跃的开发者社区构建网站、创建主题和插件供其他人使用。
虽然通过一键式 WordPress 设置获得托管包很容易,但也可以简单地通过命令行在 Linux 服务器上设置自己的托管包,而且树莓派是一种用来尝试它并顺便学习一些东西的相当好的途径。
一个经常使用的 Web 套件的四个部分是 Linux、Apache、MySQL 和 PHP。这里是你对它们每一个需要了解的。
Linux
树莓派上运行的系统是 Raspbian,这是一个基于 Debian,为运行在树莓派硬件上而优化的很好的 Linux 发行版。你有两个选择:桌面版或是精简版。桌面版有一个熟悉的桌面还有很多教育软件和编程工具,像是 LibreOffice 套件、Mincraft,还有一个 web 浏览器。精简版本没有桌面环境,因此它只有命令行以及一些必要的软件。
这篇教程在两个版本上都可以使用,但是如果你使用的是精简版,你必须要有另外一台电脑去访问你的站点。
Apache
Apache 是一个受欢迎的 web 服务器应用,你可以安装在你的树莓派上伺服你的 web 页面。就其自身而言,Apache 可以通过 HTTP 提供静态 HTML 文件。使用额外的模块,它也可以使用像是 PHP 的脚本语言提供动态网页。
安装 Apache 非常简单。打开一个终端窗口,然后输入下面的命令:
sudo apt install apache2 -yApache 默认放了一个测试文件在一个 web 目录中,你可以从你的电脑或是你网络中的其他计算机进行访问。只需要打开 web 浏览器,然后输入地址 <http://localhost>。或者(特别是你使用的是 Raspbian Lite 的话)输入你的树莓派的 IP 地址代替 localhost。你应该会在你的浏览器窗口中看到这样的内容:
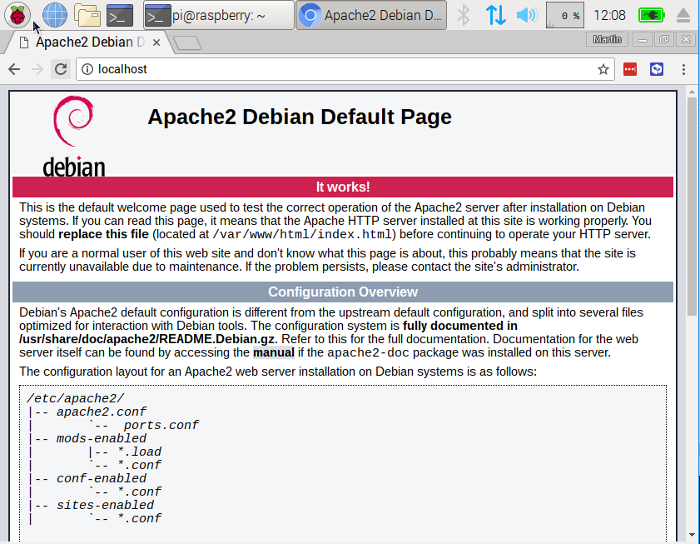
这意味着你的 Apache 已经开始工作了!
这个默认的网页仅仅是你文件系统里的一个文件。它在你本地的 /var/www/html/index/html。你可以使用 Leafpad 文本编辑器写一些 HTML 去替换这个文件的内容。
cd /var/www/html/
sudo leafpad index.html保存并关闭 Leafpad 然后刷新网页,查看你的更改。
MySQL
MySQL(读作 “my S-Q-L” 或者 “my sequel”)是一个很受欢迎的数据库引擎。就像 PHP,它被非常广泛的应用于网页服务,这也是为什么像 WordPress 一样的项目选择了它,以及这些项目是为何如此受欢迎。
在一个终端窗口中输入以下命令安装 MySQL 服务(LCTT 译注:实际上安装的是 MySQL 分支 MariaDB):
sudo apt-get install mysql-server -yWordPress 使用 MySQL 存储文章、页面、用户数据、还有许多其他的内容。
PHP
PHP 是一个预处理器:它是在服务器通过网络浏览器接受网页请求是运行的代码。它解决那些需要展示在网页上的内容,然后发送这些网页到浏览器上。不像静态的 HTML,PHP 能在不同的情况下展示不同的内容。PHP 是一个在 web 上非常受欢迎的语言;很多像 Facebook 和 Wikipedia 的项目都使用 PHP 编写。
安装 PHP 和 MySQL 的插件:
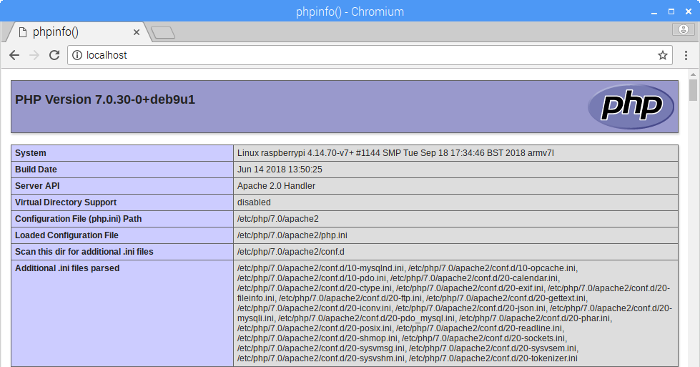
sudo apt-get install php php-mysql -y删除 index.html,然后创建 index.php:
sudo rm index.html
sudo leafpad index.php在里面添加以下内容:
<?php phpinfo(); ?>保存、退出、刷新你的网页。你将会看到 PHP 状态页:
WordPress
你可以使用 wget 命令从 wordpress.org 下载 WordPress。最新的 WordPress 总是使用 wordpress.org/latest.tar.gz 这个网址,所以你可以直接抓取这些文件,而无需到网页里面查看,现在的版本是 5.8.2。
确保你在 /var/www/html 目录中,然后删除里面的所有内容:
cd /var/www/html/
sudo rm *使用 wget 下载 WordPress,然后提取里面的内容,并移动提取的 WordPress 目录中的内容移动到 html 目录下:
sudo wget http://wordpress.org/latest.tar.gz
sudo tar xzf latest.tar.gz
sudo mv wordpress/* .现在可以删除压缩包和空的 wordpress 目录了:
sudo rm -rf wordpress latest.tar.gz运行 ls 或者 tree -L 1 命令显示 WordPress 项目下包含的内容:
.
├── index.php
├── license.txt
├── readme.html
├── wp-activate.php
├── wp-admin
├── wp-blog-header.php
├── wp-comments-post.php
├── wp-config-sample.php
├── wp-content
├── wp-cron.php
├── wp-includes
├── wp-links-opml.php
├── wp-load.php
├── wp-login.php
├── wp-mail.php
├── wp-settings.php
├── wp-signup.php
├── wp-trackback.php
└── xmlrpc.php
3 directories, 16 files这是 WordPress 的默认安装源。在 wp-content 目录中,你可以编辑你的自定义安装。
你现在应该把所有文件的所有权改为 Apache 的运行用户 www-data:
sudo chown -R www-data: .WordPress 数据库
为了搭建你的 WordPress 站点,你需要一个数据库。这里使用的是 MySQL。
在终端窗口运行 MySQL 的安全安装命令:
sudo mysql_secure_installation你将会被问到一系列的问题。这里原来没有设置密码,但是在下一步你应该设置一个。确保你记住了你输入的密码,后面你需要使用它去连接你的 WordPress。按回车确认下面的所有问题。
当它完成之后,你将会看到 “All done!” 和 “Thanks for using MariaDB!” 的信息。
在终端窗口运行 mysql 命令:
sudo mysql -uroot -p输入你创建的 root 密码(LCTT 译注:不是 Linux 系统的 root 密码,是 MySQL 的 root 密码)。你将看到 “Welcome to the MariaDB monitor.” 的欢迎信息。在 “MariaDB [(none)] >” 提示处使用以下命令,为你 WordPress 的安装创建一个数据库:
create database wordpress;注意声明最后的分号,如果命令执行成功,你将看到下面的提示:
Query OK, 1 row affected (0.00 sec)把数据库权限交给 root 用户在声明的底部输入密码:
GRANT ALL PRIVILEGES ON wordpress.* TO 'root'@'localhost' IDENTIFIED BY 'YOURPASSWORD';为了让更改生效,你需要刷新数据库权限:
FLUSH PRIVILEGES;按 Ctrl+D 退出 MariaDB 提示符,返回到 Bash shell。
WordPress 配置
在你的 树莓派 打开网页浏览器,地址栏输入 http://localhost。选择一个你想要在 WordPress 使用的语言,然后点击“Continue”。你将会看到 WordPress 的欢迎界面。点击 “Let’s go!” 按钮。
按照下面这样填写基本的站点信息:
Database Name: wordpress
User Name: root
Password: <YOUR PASSWORD>
Database Host: localhost
Table Prefix: wp_点击 “Submit” 继续,然后点击 “Run the install”。
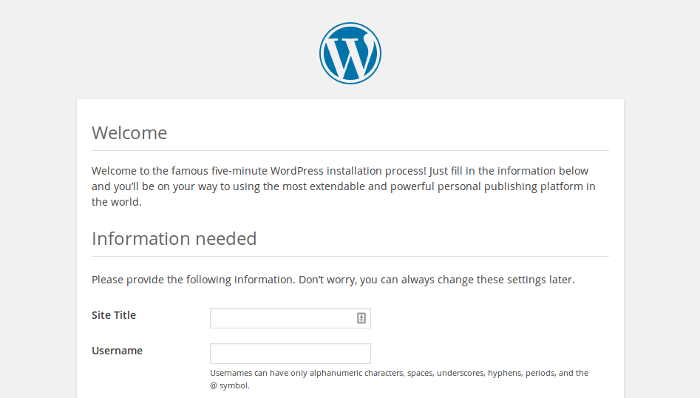
按下面的格式填写:为你的站点设置一个标题、创建一个用户名和密码、输入你的 email 地址。点击 “Install WordPress” 按钮,然后使用你刚刚创建的账号登录,你现在已经登录,而且你的站点已经设置好了,你可以在浏览器地址栏输入 http://localhost/wp-admin 查看你的网站。
永久链接
更改你的永久链接设置,使得你的 URL 更加友好是一个很好的想法。
要这样做,首先登录你的 WordPress ,进入仪表盘。进入 “Settings”,“Permalinks”。选择 “Post name” 选项,然后点击 “Save Changes”。接着你需要开启 Apache 的 rewrite 模块。
sudo a2enmod rewrite你还需要告诉虚拟托管服务,站点允许改写请求。为你的虚拟主机编辑 Apache 配置文件:
sudo leafpad /etc/apache2/sites-available/000-default.conf在第一行后添加下面的内容:
<Directory "/var/www/html">
AllowOverride All
</Directory>确保其中有像这样的内容 <VirtualHost *:80>:
<VirtualHost *:80>
<Directory "/var/www/html">
AllowOverride All
</Directory>
...保存这个文件,然后退出,重启 Apache:
sudo systemctl restart apache2下一步?
WordPress 是可以高度自定义的。在网站顶部横幅处点击你的站点名,你就会进入仪表盘。在这里你可以修改主题、添加页面和文章、编辑菜单、添加插件、以及许多其他的事情。
这里有一些你可以在树莓派的网页服务上尝试的有趣的事情:
- 添加页面和文章到你的网站
- 从外观菜单安装不同的主题
- 自定义你的网站主题或是创建你自己的
- 使用你的网站服务向你的网络上的其他人显示有用的信息
不要忘记,树莓派是一台 Linux 电脑。你也可以使用相同的结构在运行着 Debian 或者 Ubuntu 的服务器上安装 WordPress。
推荐10个好用的PCB设计工具
以下列出的是最值得推荐的10个印制电路板(PCB)设计软件:
PCB设计软件工具比较标准
需要说明的是,这并不是一个最佳的排名列表,因为不同的任务和工作流程有不同的需要,我希望这个列表能让您了解在选择最适合您需求的设计时提供参考。
评估标准:
- 用户界面(UI)设计:当我寻找PCB设计软件时,我首先关注的是这个工具是否设置了让设计者容易上手的导航栏。当我使用软件时,我会考虑与我交互的视觉按钮。直观的UI设计确保您可以立即开始设计电路,而无需花费大量时间学习或参考手册。
- 受欢迎度:当更多的人使用一个软件工具时,是因为它有一些很棒的功能。例如,我查看掌握该工具的容易程度,以及其开发人员是否通过培训和易于理解的教程提供了出色的支持。
- 集成:为了使PCB软件真正实现自动化并节省时间,它需要与您已经在使用的其他软件工具集成。因此,您选择的PCB软件能够与项目管理或其他PCB设计工具集成是很重要的。
- 成本:大多数PCB设计软件工具都非常昂贵。这就是为什么我经常根据功能和成本来比较工具。虽然我接受工具会有不同的价格,因为它们有不同的功能。但我仍然想确保一个工具的价格对我的业务的价值和它的好处是值得的。
印制电路板(PCB)设计软件关键的特点
一个PCB设计工具要满足各种重要要求,就需要具备一定的基本特性。然而,重要的是要注意,对一个人来说很棒的功能可能对其他人来说并不相关。
以下这些是内容是我认为选择PCB设计软件需要关注的:
- 仿真:为您提供电路原理是否正确、验证与分析PCB布局布线合理性以及是否满足可制造性。
- 层数:这是一个基本功能,支持更多层数的PCB设计工具可以管理具有更复杂PCB设计要求的更高数量的组件。 3D建模:这可以让你了解PCB设计完成后的真实的样子。
- 3D建模:这可以让你了解PCB设计完成后的真实的样子。
- 复杂性和速度:PCB软件工具处理不同级别的复杂性和速度。更昂贵的工具通常能够处理更复杂的设计任务。这些工具通常提供更快的速度。
- 库:PCB设计工具必须有一套相对完整的元件库文件。
- Web和操作系统兼容性:检查软件是否需要下载到您的计算机上,或者您是否需要将其作为SaaS使用。此外,还要确定软件是否能与设备的操作系统兼容。
以下列出的是最值得推荐的10个印制电路板(PCB)设计软件的概要性的介绍:
下面,我提供了每个PCB设计软件工具的总结。我的描述集中在最佳用例和工具的主要特性上。
- PCBWeb Designer– 最好的,且免费的PCB设计软件
PCBWeb Designer是一个全方位服务的电子硬件设计和制造工具。它受欢迎的原因之一是它是免费的。这意味着对于一块板上使用的元器件数量没有限制。该软件也没有对板子大小的限制。
这个软件出现在最值得推荐的PCB设计软件列表上,因为它是免费的,且有一些很棒的功能。PCBWeb Designer易于使用的连线工具使设计多页原理图成为可能。此外,该软件允许布多层板,还支持DRC检查和敷铜。用户还可以使用材料清单管理器访问Arrow的元器件目录。
- ZenitPCB– 适合初学的PCB设计者

ZenitPCB出现在几乎所有最好的PCB设计软件工具列表中的一个原因是,该工具是直观的,非常容易学习,这使它成为一个优秀的程序。设计者不需要专门的培训就可以完成自己的PCB设计任务。
因为这是一个简单且实用的程序,你会注意到该工具主要是高中或大学的学生和他们的老师在使用。然而,这款软件的主要缺点是它没有自动布线器或自动布局等方便的功能。
如果您是个人或半专业用途使用这个程序,它是完全免费的,但有800pin的限制。
TinyCAD是一个用于绘制电路图(原理图)的开源程序。它支持标准元件库和支持用户创建自己的元件库。该工具还支持输出多种PCB网表,并可以生成SPICE网表。
尽管在TinyCAD中创建元件库相对容易,但这个过程非常耗时。然而,作为一个开源程序,它允许用户将他们认为对他人有用的符号上传到程序中,以便其他用户可以下载它们。
在TinyCAD网站上,您可以访问教程和其他支持材料,还可以创建和下载自定义元件库。如果您遇到了一些问题,您可以在网站上报告它们并获得帮助。
TinyCAD是一个免费的工具
- Osmond PCB– Best PCB design software for Macintosh
Osmond PCB的开发人员承诺该工具必须具备灵活的特点。为了实现这一承诺,他们开发了允许用户使用公制或英制单位的软件。这两种单位,也可以用于相同的设计。该工具集成的元件编辑器使更改现有元件或定义新的元件变得容易。
Osmond PCB是一个优秀的程序,因为它没有任何限制。这意味着你可以设计任意大小和任意层数的PCB。一旦您完成了设计,Osmond将提供工具来帮助您检查完成的产品是否满足所有指定的设计规则。
Osmond PCB可免费使用。然而,也接受捐款以帮助支付持续支持和更新软件的费用。
- BSch3V– Best PCB design software for Windows
缩写“BSch”代表“Basic Schematic”。 BSch3V的设计者将其定义为Windows的原理图绘制程序。由于BSch3V的功能是基础的,所以它主要适用于项目不是很复杂的PCB设计。
BSch3V的主要功能包括一个元件库编辑器,PCB网表生成器和元件列表生成器。
BSch3V可以免费使用。
- ExpressPCB– Best PCB design software for reducing lead times
ExpressPCB已经在市场上存在了20多年。因此,这是PCB设计团队的首选软件,他们想要节省从开始的一个想法到完成产品交付所花费的时间。此外,该软件多年来一直在不断改进,确保它既适合专业人士,也适合初学者。
您可以获得两个版本的ExpressPCB: ExpressPCB Classic和ExpressPCB Plus。Classic版本更适合需要易用性的团队。它的Schematic更容易上手,而它的快速设置意味着您可以尽可能快地开始工作。Plus版本是为需要灵活性的更复杂设计的团队设计的。
您可以免费使用ExpressPCB
- KiCad– Best for inspecting PSB designs in 3D
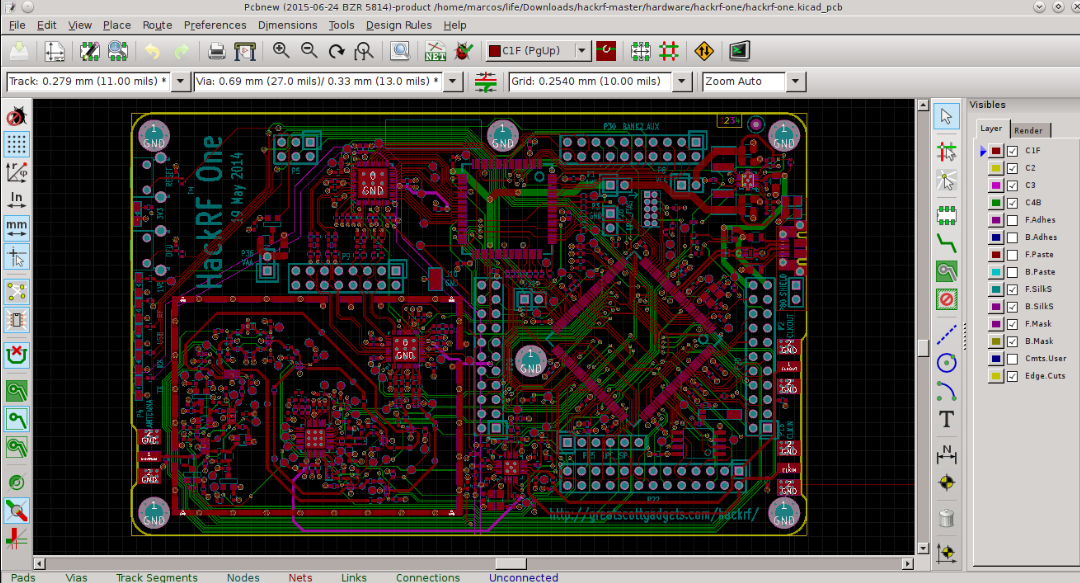
KiCad是EDA(电子设计自动化)行业的开源软件,具有用于PCB设计的原理图、PCB布局和GERBER文件输出。该工具含有设计者希望的PCB设计软件中所有的标准功能,如软件自带的原理图符号库和内置的原理图符号编辑器等。
KiCad的最新版本5.1.10增强了一些功能,比如修复了关键bug。它还改进了3D模型库、PCB封装、原理图符号和文档。
KiCad是由包括法国格勒诺布尔大学在内的几个基金会和组织赞助的免费软件。
- Fritzing– Best for PCB design amateurs and hobbyists
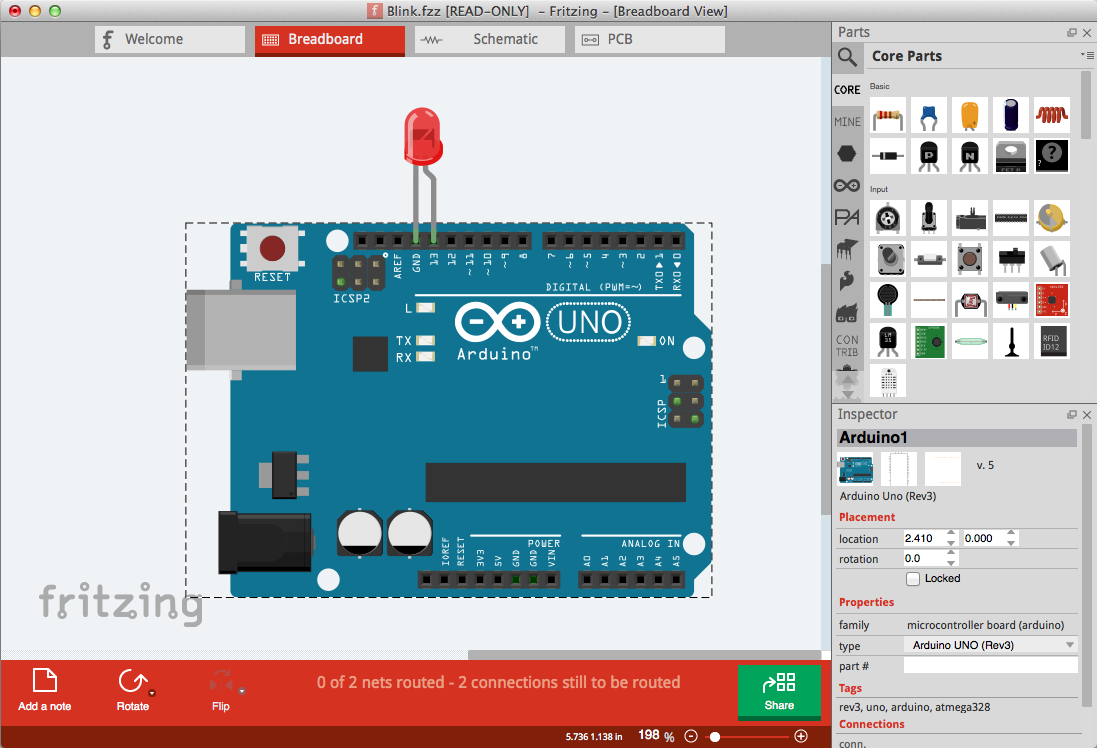
Fritzing是一个开源硬件项目,它借鉴Processing和Arduino平台,允许用户处理电路以进行快速原型开发,共享原型文档,并设计定制的PCB。该工具是由波茨坦应用科学大学开发的,以帮助PCB爱好者和业余爱好者。
Fritzing的最新版本0.9.6,允许通过在线数据库自动更新零件库。它还有助于关键错误的修复,高DPI显示支持,以及更容易的创建和自定义元件。
作为一个开源项目,fritzzing是一个免费的工具。
- DesignSpark PCB– Best for schematic capturing and layout improvement
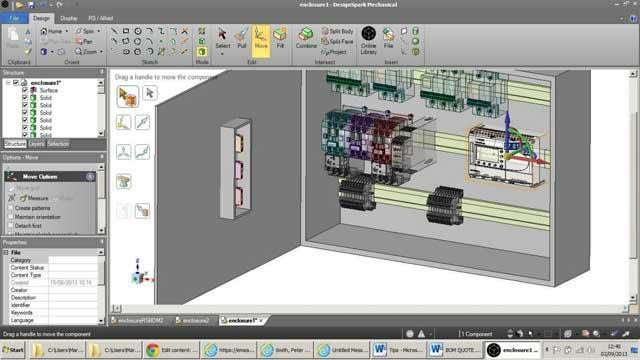
DesignSpark PCB是一个非常优秀的免费软件,它受欢迎的程度正在飙升。你会喜欢这个软件的主要因素之一是它的直观性,无论你是初学者还是有经验的专业人士,这个程序都很容易使用。该工具有助于设计PCB板和布局,原理图绘制,并进行布局改进。
将DesignSpark PCB列入最值得推荐的10个印制电路板(PCB)设计软件最重要的一个因素是,该工具无缝集成到PCB设计师已经使用的许多工具中。
DesignSpark PCB是一个免费工具。
- gEDA– Best for printed circuit board design

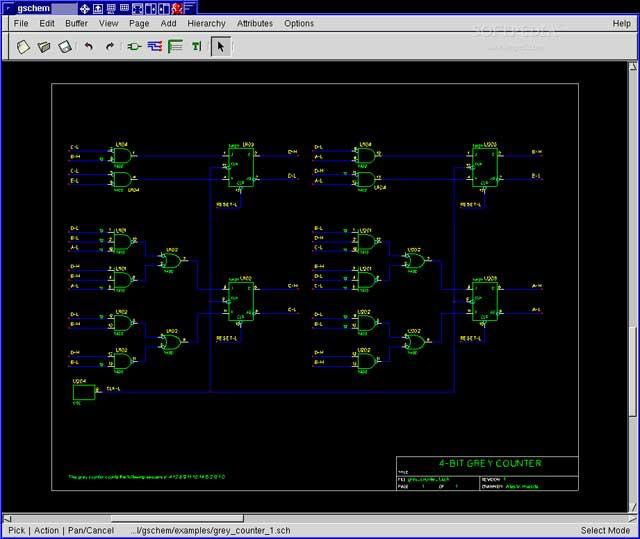
gEDA是一个集多个开源软件包于一体的套件。它可以生成其他文件类型,如:*.ps或*.png。该软件具有自动布线功能和许多其他功能。软件即有强大的功能而且表现得很高效。特别推荐与gEDA原理图编辑器一起使用。
该工具主要面向印刷电路板设计(相对于集成电路设计),软件采取通用公共许可证(GPL)去完成电子设计。由于该项目的开放性,原理图符号、PCB封装和实用程序脚本可以在gEDA社区的一个附属网站(gedasymbols.org)上自由创建并共享。
gEDA提供丰富的库文件和专业支持社区且不收取额外费用。它是一个开源电子设计工具的集合。同时,也可以单独安装。
gEDA是免费使用的
Other PCB Design Software Tools
其他被推荐的PCB设计软件
如果您不能在这上面介绍的工具中找到满足您所有需求的PCB软件,这里还有一些其他得工具可以推荐。
- FreePCB:一个免费的,开源的,基于微软Windows操作系统开发的PCB设计软件,软件易于学习和使用,并且还能够专业,高质量的完成设计工作。
- Eagle:一个容易使用的图形化界面的PCB布局编辑器(EAGLE),同时,软件具有强大的原理图功能和友好的界面,很多专业人士也在使用该工具。
- Altium:这是一个具有高可靠性的PCB设计软件,软件将帮助设计者为实现多种真实的应用场景而创建令人惊叹的PCB。软件功能非常强大,并要求运行在Windows操作系统上。
- DipTrace: 软件高效、快速地创建设计,从而节省设计时间。对于初学者或时间紧张的人来说,DipTrace非常理想,软件具有原理图绘制功能和PCB编辑以及布线功能,还能转换为多种格式。
- Pulsonix:这是一个易于使用,提供一个完整且专业的PCB编辑器,用户还可选购极其优秀的自动布线器。该软件在一个设计环境中结合了原理图输入和PCB布局。
- Sprint Layout:具有逻辑清晰且非常容易上手的PCB设计工具,软件适合任何人,特别是适合初学者且急于完成设计的人。软件支持集成Excel控件,也能输出专业的生产文件Gerber。
- EasyEDA: 软件有自带的元件库超过100万,还允许用户创建或导入元件库。
- PCB Artist:用户能够访问一个拥有超过50万个元器件库、设计多达28层的PCB设计文件,软件还具有人为干涉的自动布线器、能完成多页原理图绘制和自然导入Eagle格式的文件。
- Ultiboard: 软件具有很多自动化的功能,使得设计者可以很快完成PCB设计。该工具其他的功能:如电子表格视图、工具箱和设计向导,使得管理PCB设计文件更容易。
- Solidworks PCB易于将电子原理图集成到3D模型中,通过自动化重复任务节省您的时间。
下是在讨论PCB设计工具时经常遇到的两个问题:
什么是PCB设计软件?
PCB设计软件是设计工程师借助计算机来完成印刷电路板(PCB)的计算机程序。通常,该软件程序由一些软件模块工具组成,这些工具使用户能够在项目上进行协作,访问先前创建的元件库,并确定电路原理图设计的准确性等任务。
为什么需要PCB设计软件?
PCB设计软件对于PCB设计人员来说是至关重要的,因为它允许过程的自动化,否则需要很长时间才能完成。该软件还允许协作,使得将执行项目所需的所有信息放到单个文件仓库中成为可能,在该文件仓库中,所有项目相关人都可以实时看到变化。PCB设计软件对于管理质量也是至关重要的,因为它可以确定是否满足了所有的项目规格。